Download
1 / 13

E N D
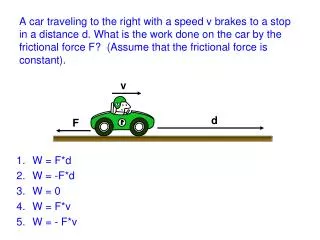
II ) RÉVISION : MOMENTS ET COUPLES.Objectif : · Définir le moment d’une force par rapport à un point.· Développer la notion de vecteur-moment et de moment d’une force par rapport à un axe.Prérequis :· Produit vectoriel.· Notion de force. Les effets d’une force sur un solide dépendent de la position de la force par rapport au corps.
Si la force ( poussée des moteurs.) passe par le centre de gravité G de la navette, le vaisseau est animé d’un mouvement de translation rectiligne uniformément accéléré de même direction que (fig. a).Si la force ne passe pas par G, le vaisseau est à la fois animé d’un mouvement de translation et un mouvement de rotation. Ces mouvements sont fonction de l’inclinaison des moteurs ou de la distance d (fig. b). Pour traduire avec précision les effets d’une force, compte tenu de sa position, il est nécessaire de faire intervenir la notion de moments.
A ) Moment d’une force par rapport à un point.1°) Définition. Le moment de le force F par rapport au point A, noté MA(F) = a) Convention de signe.Si F fait tourner le solide autour de A dans le sens trigonométrique, le moment est dit positif.Si F est dans l’autre sens, le moment devient négatif(c’est le cas de la navette autour du point G). F . d
Remarque : Si B est le point d’application de F et si la longueur AB est connue, MA(F) peut être calculé par :MA(F) = en remarquant que : AB.sin = d F . d = F . (AB. sin ) MA ( F )
b) Exemple :Déterminons le couple de serrage exercé par une clé plate sur un écrou en fonction de l’inclinaison de l’effort B3/2 exercé par la main de l’opérateur.·Si AB est perpendiculaire à B3/2.· Si = 60° : · Si = 45° : MA (B3/2) = B3/2 . d = B3/2 . AB MA (B3/2) = 100 . 0,2 = 20 Nm MA (B3/2) = B3/2 . d1 = B3/2 . AH1 MA (B3/2) = 100 . (0,2 .sin 60°) = 100 . 0,17 = 17 Nm MA (B3/2) = B3/2 . d2 = B3/2 . AH2 MA (B3/2) = 100 . (0,2 .sin 45°) = 100 . 0,14 = 14 Nm
2°) Théorème de Varignon.Le moment de la force F au point A est égal à la somme des moments de ses composantes U et V par rapport au même point. MA(F) = Pour le cas de la figure :MA(F)= F . d F . d = MA(U) + MA(V) = -(U.du) + V.dv
Exemple :Déterminons MA(F). Fx = F.cos60° = 1000 . cos60° = 1000 . 0,5 = 500 N et Fy = F.sin60° = 1000.sin60° = 1000 . 0,866 = 866 N Ma(F) = -(Fx.0,1) + Fy.0,16 Ma(F) = -(500.0,1) + 866.0,16 = -50 + 138,6 = 88,6Nm
B ) Vecteur moment.1°) Définition. Soit un point B, quelconque, appartenant à la direction de la force F. Le moment en A de F est défini par le vecteur :Ma(F) = Ma(F) est un vecteur à la fois perpendiculaire à F et à AB. Il ce caractérise géométriquement par : F .d Ou F .( AB . Sin θ ) * Son point d’application. A * Sa direction. perpendiculaire au plan A,B,H. * Son sens positif ou négatif sur l’axe Z. * Sa norme Ma(F) = F.d en Nm.
Remarque : · AB, F et Ma(F) suivent la règle des trois doigts de la main droite (ou règle du tire bouchon).· Le produit vectoriel n’est pas commutatif. AB F = - F AB Ma(F) = 0 si : • la norme F = 0 N • la distance d = 0 m • l’angle = 0° • C’est a dire que la direction de la force F passe par A.
2°) Détermination analytique du moment d’une force.Dans le repère (0,x,y,z ) : Coordonnées du point A (xa, ya, 0) et B (xb, yb, 0). Composante de F1/2 (XF1/2, YF1/2, 0).Le moment au point A de la force F1/2 peut être déterminé analytiquement par :ABF = Ma(F1/2)L 1/2 =M 1/2 = N 1/2 = L1/2 momentde la force F1/2 par rapport à l’axe (0,x).M1/2 momentde la force F1/2 par rapport à l’axe (0,y).N1/2 momentde la force F1/2 par rapport à l’axe (0,z).Le moment par rapport à un axe est nul si le support de la force est sécant ou parallèle à cet axe. Xa Ya 0 XF1/2 YF1/2 0 0 0 (Xa.YF1/2) – (Ya.XF1/2)
C ) Moment résultant de plusieurs forces.Le moment résultant MA(F) en un point A de n forces F1,F2 ,F3 ....,Fn est égal à la somme des moments en A de chacune des forces.MA(F) = MA(F1) + MA(F2) + MA(F3) + ……+MA(Fn)Si les forces appartiennent toutes à un même plan (sont coplanaires), le moment peut être écrit sous la forme algébrique.MA(F) =D ) Variation du moment d’un point à un autre. Soit un autre point D n’appartenant pas au support de la force F1/2.Le moment en D de F1/2 est : MD (F1/2) + (F1 . d1) + (F2 . d2) + (F3 . d3) + ……+ (Fn . dn) MD(F1/2) = MA(F1/2) + DA^ F1/2
E ) Exemple : Balance romaine.Une balance romaine se compose d’un balancier 2 articulé en O (pivot) sur un crochet 1 lié à un support fixe et d’une masse d’équilibrage mobile 3 ( a variable) de poids q = 5 daN. La masse à peser ou le poids P, est suspendue en B par l’intermédiaire d’un crochet 4. Si a = 700mm, déterminons la valeur de P.
Somme des MO=0 MO(P) + MO(O) + MO(Q) = 0 + (P.OB) + (O.OO) - (Q.OQ) = 0 + (P.0,1) + 0 – (50.0,7) = 0 P = (50.0,7) / 0,1 = 350 N