Download
1 / 47
470 likes | 561 Views
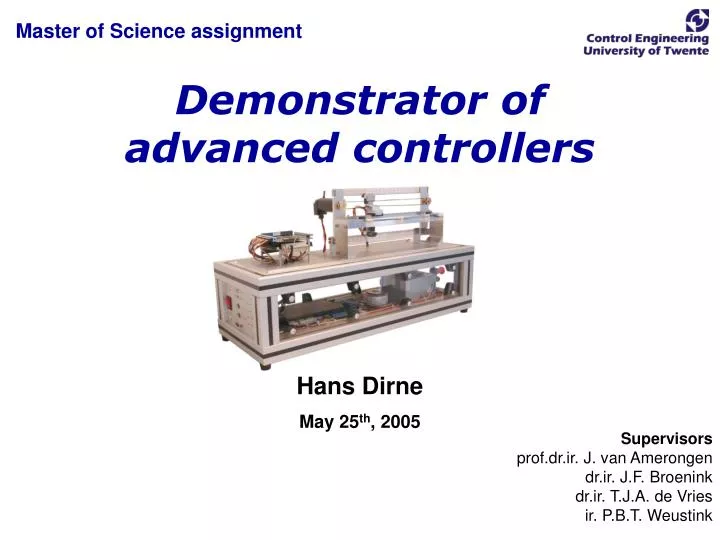
Master of Science assignment. Demonstrator of advanced controllers. Hans Dirne. May 25 th , 2005. Supervisors prof.dr.ir. J. van Amerongen dr.ir. J.F. Broenink dr.ir. T.J.A. de Vries ir. P.B.T. Weustink. Why this assignment?. The Major ‘Mechatronics’ provides several courses

E N D
Master of Science assignment Demonstrator of advanced controllers Hans Dirne May 25th, 2005 Supervisors prof.dr.ir. J. van Amerongen dr.ir. J.F. Broenink dr.ir. T.J.A. de Vries ir. P.B.T. Weustink
Why this assignment? The Major ‘Mechatronics’ provides several courses in control theory, in which the theory is often supported by simulations. A physical setup might, in addition to simulations, be an enrichment for demonstrating control theory. Such a demonstration setup will be able to make the theory more insightful and will show real limitations in practical setups. Demonstrator of advanced controllers
To design, build and test a mechatronic demonstration setup, with which several control algorithms can be shown in practice To be able to demonstrate performance differences of control algorithms in practice Objectives Demonstrator of advanced controllers
Demonstration setup options Control systems Design of the new demonstrator Experiments Demonstration Conclusions & recommendations Overview Demonstrator of advanced controllers
Demonstration setup options Demonstrator of advanced controllers
Mechatronic system Portable and easy to set up Robust, safe and failsafe design High level of observability Representable by linear 4th order model Clear link with well known device Criteria Demonstrator of advanced controllers
Three options • ‘Linix’ laboratory setup 2. Setup of ‘Controllab Products B.V.’ 3. New build Demonstrator of advanced controllers
Option 1: ‘Linix’ Laboratory Setup Demonstrator of advanced controllers
‘Linix’ Laboratory Setup encoders motor inertia 2 inertia 1 transmission Demonstrator of advanced controllers
‘Linix’ Laboratory Setup Demonstrator of advanced controllers
‘Linix’ Laboratory Setup Major disadvantage: slip between belt and inertias Demonstrator of advanced controllers
Option 2: CLP setup Demonstrator of advanced controllers
CLP setup Demonstrator of advanced controllers
CLP setup Demonstrator of advanced controllers
Sensor positions Demonstrator of advanced controllers
Option 3: New Build Advantage • Pure design freedom Disadvantage • Requires very much time and effort to design Demonstrator of advanced controllers
Control Systems Demonstrator of advanced controllers
Viscous PLUS coulomb friction Mathematical model – 6th order Demonstrator of advanced controllers
Focus • Linear Quadratic Gaussian (LQG) • Proportional, Integral, Differential (PID) Demonstrator of advanced controllers
LQG explanation A LQG control algorithm is a combination of • Lin. Quad. Regulator (state feedback) • Lin. Quad. Estimator (state estimation) 4th order linear model required! Demonstrator of advanced controllers
4th order linear model Required steps: • Downsize system order • Linearize system: discard coulomb friction Result: linear 4th order model (e.g. State Space) Demonstrator of advanced controllers
LQG controlled system Demonstrator of advanced controllers
PID Demonstrator of advanced controllers
Tuning (1) For proper comparison of the PID with the LQG controlled system, tuning with the same criteria is required. • Avoid actuator saturation • Minimization of criterion: position error controller output Demonstrator of advanced controllers
Tuning (2) Tuning procedure: • Set Q and R • Minimize criterion J by optimizing controller gains (KLQG and KP,KI,KD) Demonstrator of advanced controllers
Tuning (3) Optimization results KP = 15.7 KI = 42 KD = 1.6 KLQG = [3.7, 74, 8.2, 70]T Demonstrator of advanced controllers
PID vs LQG (1) • The PID controlled system consumes twice the power of the LQG system • The maximum frame movement in the PID controlled system is twice compared to LQG Demonstrator of advanced controllers
PID vs LQG (2) The LQG control algorithm leads to an unacceptable position error with the nonlinear process Demonstrator of advanced controllers
LQG+ Demonstrator of advanced controllers
LQG+ vs LQG Effect of integrator: Static error is minimized! Interesting to see the performance of LQG+ in practice… Demonstrator of advanced controllers
Design of the new demonstrator Demonstrator of advanced controllers
Procedure Goal: to test a control algorithm on a physical setup How? Demonstrator of advanced controllers
System overview (1) Client: • Runs MS Windows • Generating models • Model control (start/stop/upload/delete) • Setting parameters of controlled system real-time • View parameters of controlled system real-time Server: • Runs Linux, with real-time kernel • Runs control system • Performs I/O Demonstrator of advanced controllers
System overview (2) Demonstrator of advanced controllers
Realization Mechatronics Embedded PC + I/O Power (CPU) Power (motor) Motor amplifier Demonstrator of advanced controllers
Experiments Demonstrator of advanced controllers
Experiments • Comparison of PID/LQG/LQG+ performance on the new demonstration setup • Same controller parameters used as in simulation (after tuning) • Performance comparison on: • Static error • Frame vibration • Power usage Demonstrator of advanced controllers
Results The LQG+ controlled system outperforms the PID controlled system: • Maximum frame movement differs factor 3 • Total power consumption differs a factor 2 • Both control algorithms minimize the static error, but the LQG controlled system is faster More performance increase is expected with a better model Differences in performance between 2nd order PID and 4th order LQG have now been demonstrated in practice Demonstrator of advanced controllers
Demonstration Demonstrator of advanced controllers
Demonstration What will be shown: • ‘Homing’ of the demonstrator • Determining absolute position • PID controller in practice with various controller gains Furthermore: • Online adjustment of parameters • Real-time variable monitoring • Real-time animation of demonstration setup Demonstrator of advanced controllers
Conclusions & Recommendations Demonstrator of advanced controllers
Conclusions • The new mechatronic demonstration setup is a compact, integrated machine that forms a versatile development environment for testing various control algorithms in practice • The new demonstrator allows for easy comparison of different control algorithms 3. Non-linear friction elements in the process will lead to lower performance in position control of a 4th order LQG-controlled system compared to a 2nd order PID control algorithm 4. Addition of an integrating term leads to an ‘LQG+’ control algorithm that can compensate for differences between process and reference model. Demonstrator of advanced controllers
Recommendations Hardware • Expand safety system • Reduce weight of the demonstrator (next version) • Add parallel processing (e.g. distributed control) Software / control • Experiment with more control systems (MRAS, (L)FF, ILC etc) • Perform system identification General 1. Set up lab work assignments for student Demonstrator of advanced controllers
Questions…? Demonstrator of advanced controllers
THANK YOU FOR YOUR ATTENTION you are all invited for DRINKS at ‘De Tombe’, floor 0 Demonstrator of advanced controllers