Download
1 / 29
300 likes | 447 Views
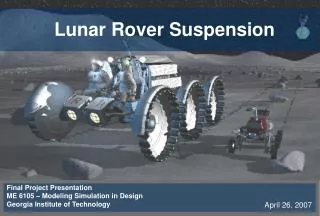
Lunar Micro-Rover Project Briefing. Level 1 Milestones. Produce LMR-Alpha Complete a fully flight ready rover capable of surviving on the moon for an three and a half hours while completing all science objectives. Identify Launch Opportunities Develop relationships with candidate missions.

E N D
Level 1 Milestones Produce LMR-Alpha Complete a fully flight ready rover capable of surviving on the moon for an three and a half hours while completing all science objectives. Identify Launch Opportunities Develop relationships with candidate missions.
Colleges with Students Participating Rose-Hulman Institute of Technology (Terre Haute, In) University of New Mexico (Albuquerque, NM) University of Rochester (Rochester, NY) Polytechnic University (New York, NY) Cal Poly Pomona (Pomona, CA) Princeton (Princeton, NJ) Worcester Polytechnic Institute (Worchester, MA) University of Oregon (Eugene, OR) University of Hawaii at Manoa (Honolulu, HI) North Carolina State University (Raleigh, NC) University of Michigan (Ann Arbor, MI) University of Illinois (Urbana-Champaign, IL) Louisiana State University (Baton Rouge, LA) University of Mary Washington (Fredericksburg, VA) Purdue University (West Lafayette, IN) San Jose State University (San Jose, CA) California State University East Bay (Hayward, CA) University of California San Diego (La Jolla, CA) Santa Clara University (Santa Clara, CA) University of Minnesota (Minneapolis, MN) Cal Poly San Luis Obispo (San Luis Obispo, CA) Massachusetts Institute of Technology (Cambridge, MA) University of Southern California (Los Angeles, CA) High Schools with Students Participating: Prospect High School (San Jose, CA) Gunn High School (Palo Alto, CA) Lynbrook High School (San Jose,CA) Palo Alto High School (Palo Alto,CA) Lunar Robotics AcademyClass of 2011Ames Research Center
Robotics Academy Organization Chart Robotics Academy Captain Drew Price Robotics Academy Financial Officer AshwinMathur Robotics Academy Assets Drew Price Robotics Academy Lieutenant Guy Chriqui LMR Transport and Surface Delivery Mission Guy Chriqui LMR Project Funding Guy Chriqui Robotics Academy 2nd Lieutenant Jenny Yang Cadet Management Jenny Yang Special Projects Jenny Yang LML Mock Up Jim Freel Structural Integrity System Jim Freel Power Control System Dane Bennington Communications System Matt Carberry Command and Data Handling System Jack Biesiadecki Rover Avionics System Matt Carberry Camera Payload System Dane Bennington Thermal Control System Jacques Dolan Rover Simulation Software Mike Stewart Radiation Mitigation System Mike Zwach
Mobility/StructuralDesign Features • Two wheel drive with wheels directly driven by motors • High reliability • Extremely simple • Few failure points • Rear wheels eliminated in favor of tail • Reduces weight • No power transmission required between front wheels and rear, reducing complexity • Turning performance increased
Mobility/StructuralDesign Features • Single piece tubular chassis • More compact than previous designs • Pull out electronics tray • simplifies assembly/maintenance/wiring harnesses • modular • Greatly simplifies manufacturing process • Rounded edges "roll" off obstacles • Large wheels give good ground clearance • Ability to climb relatively large obstacles • Ability to continue driving if flipped
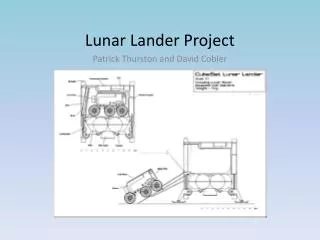
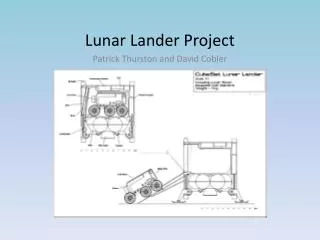
Lunar Micro LanderDesign HDPE 115 Foam – Radiation and Vibration Protection Mylar – Thermal Barrier Titanium – Thermal and Radiation Protection, Structural Support
Overview Power board Camera CPU Dust Deflector IMU Radio Radiation Sensor
Telemetry data layout Multi mode operation Real time stick input operation Non-real-time batch mode Path planning in batch mode Network status Lander radio signal strength Rover radio signal strength All data is logged for retrieval and review at any time Ground Station GUI
Enhance GUI layout for both aesthetics and functionality Finalize A2D raw sensor data in human readable output Add bootup hardware status and configuration verification to rover code Enhance rover command execution verification Current and Future Work
Rover AvionicsOverview LMR’s avionics package consists of logging motor encoder data and a real-time video stream to determine our location.
Camera Overview • Camera • Subsystem • Capturing • Navigation Low-Resolution Image • Compression High-Resolution Image
Components Software Hardware Imperx ICL-B1610 2.0 MP Camera Arvoo Orlando CL CameraLink PC/104+ Frame grabber JPEG Compression
Image Compression Original Image Floyd Steinberg Dithering Edge Detecting Randomized Dithering Thresholding
Environmental TestingSummer 2011 • Full Test: • Alpha in LMRTM • Validates Full System • Tests Rover Mounting • Tests Workmanship • P6-A Vibe Test: • Validates “Basic” Design • Does not validate LMR-Alpha • Provides Experience • Tests Workmanship • Dummy Mass Test: • Test LMR-TM box • Test Release Mechanism • Test Rover Mounting • Tests Workmanship • Alpha Thermo-vac Test: • Needs Loads on motors • Validates Thermal for Alpha • Cylindrical Thermal Test: • Test Revolutionary design • Characterize heat fluxes • Examine Cylindrical Radiation
Random Vibration Test • Prototype 6A, full functioning test • No wheels – just electronics chassis • Random Vibration (PSD) for Falcon 1 and Minotaur V Payload Environment • Internal data acquisition
LMR Alpha Conceptual ThermalControl Heat Sink Block To Outer Chassis Camera Sinked Directly to Bulkhead Nested Copper Plates With Conformal pads
Radiation Mitigation Custom Composite • Custom Composite Material • Composed of Polyethylene with Boron and Tungsten enrichments • Material designed to be light weight, thermally conductive, and shield: • Fermions (Protons, Electrons, Neutrons) • Heavy ions (He-Ni) • Mitigate secondary particle creation
Radiation Mitigation Proton Radiation Testing • Single Event Effects, Single Event Upsets, and Single Event Latch up tests • Proton Testing at Indiana University Cyclotron • Test Plan consisting of: • Fastwel CPU Board • Arvoo Video Grabber Board • MicroHard UHF Modem • Maxon Motor controller • Custom Radiation Sensor • Radiation shield cross sections (both LTM, LMR, and together with custom composite integrated) 15cm Proton beam DUT Dosimeter card
SimulationScreenshot Third Person view
SimulatorScreenshot Rover Camera View
Simulator:What’s next? • Mission scoring and ranking • Pictures can currently be taken, but they’re not scored based on content and quality yet • Scores need to be securely submitted online; the networking framework for this is not in place yet • Addition of LMR Alpha • Still waiting on more complete models for accurate simulation purposes • More missions!