Download
1 / 30
320 likes | 497 Views
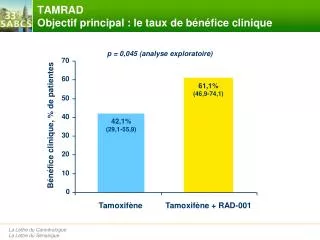
Comparaison de modèle multi-objectif pour le docking moléculaire. J-C. Boisson. Plan . Rappel : modèle multi-objectif choisi. Autre modèles. Comparaison d’algorithmes génétiques. Comparaison de configurations d’opérateur. Résultats. Perspectives. Plan .

E N D
Comparaison de modèle multi-objectif pour le docking moléculaire J-C. Boisson J-C. BOISSON Réunion Dock
Plan • Rappel : modèle multi-objectif choisi. • Autre modèles. • Comparaison d’algorithmes génétiques. • Comparaison de configurations d’opérateur. • Résultats. • Perspectives. J-C. BOISSON Réunion Dock
Plan • Rappel : modèle multi-objectif choisi. • Autre modèles. • Comparaison d’algorithmes génétiques. • Comparaison de configurations d’opérateur. • Résultats. • Perspectives. J-C. BOISSON Réunion Dock
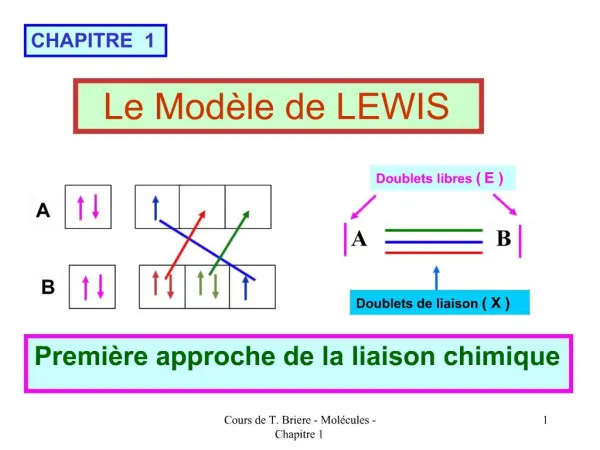
Un nouveau modèle tri-objectif (1/8) • Il est divisé en : • un terme énergétique évaluation de la qualité du complexe ligand / site obtenu. • un terme géométrique indication sur la qualité de pénétration du ligand dans le site. • Un terme de robustesse assurance de la stabilité des complexes obtenus. A-A Tantar, N. Melab, E-G. Talbi and B. Toursel. A Parallel Hybrid Genetic Algorithm for Protein Structure Prediction on the Computational Grid. Elsevier Science, Future Generation Computer Systems, 23(3):398-409, 2007. J-C. BOISSON Réunion Dock
Un nouveau modèle tri-objectif (2/8) 1. Energie du complexe ligand / site Champs de force utilisé = Consistent Valence Force Field (CVFF) J-C. BOISSON Réunion Dock
Un nouveau modèle tri-objectif (3/8) 2. Surface du complexe 3 possibilités: surface de Van Der Waals (a: blue), surface accessible au solvant (b: red), surface de Connolly (c: green). J-C. BOISSON Réunion Dock
Un nouveau modèle tri-objectif (4/8) 2. Surface du complexe 3 possibilités: surface de Van Der Waals, surface accessible au solvant surface de Connolly. SASA Solvent Accessible Surface Area Papier original S.M. Le Grand and K.M. Merz, Jr. Rapid Approximation to Molecular Surface Area via the Use of Boolean Logic and Look-Up Tables. Journal of Computational Chemistry, 14(3):349-352 (1993). Papier plus récent utilisant SASA A. Leaver-Fay, G.L. Butterfoss, J. Snoeyink and B. Kuhlman. Maintaining solvent accessible surface area under rotamer substitution for protein design. Journal of Computational Chemistry, 28(8):1336-1341 (2007). J-C. BOISSON Réunion Dock
Un nouveau modèle tri-objectif (5/8) SASA = 6201 Å2 SASA = 5548 Å2 J-C. BOISSON Réunion Dock
Un nouveau modèle tri-objectif (6/8) 3. Robustesse du complexe G = J-C. BOISSON Réunion Dock
Un nouveau modèle tri-objectif (7/8) :échantillonnage à base de rotations J-C. BOISSON Réunion Dock
Un nouveau modèle tri-objectif (8/8) : échantillonnage à base de translations J-C. BOISSON Réunion Dock
Plan • Rappel : modèle multi-objectif choisi. • Autre modèles. • Comparaison d’algorithmes génétiques. • Comparaison de configurations d’opérateur. • Résultats. • Perspectives. J-C. BOISSON Réunion Dock
Modèles testés J-C. BOISSON Réunion Dock
Plan • Rappel : modèle multi-objectif choisi. • Autre modèles. • Comparaison d’algorithmes génétiques. • Comparaison de configurations d’opérateur. • Résultats. • Perspectives. J-C. BOISSON Réunion Dock
Non-dominated Sorting GA (NSGA-II) [Deb et al. 2002] • Assignement de la fitness, tri selon la dominance : • Population divisée selon les fronts. • Fitness (x) = indice de front auquel appartient x. • Préservation de la diversité distance. • Sélection tournoi binaire. • Opérateurs de recombinaison et mutation. • Remplacement les pires individus sont supprimés. • Archive élististe des meilleures solutions rencontrées 11/09/2014 J-C. BOISSON Réunion Dock 15
Indicator-Based EA (IBEA)[Zitzler et al. 2004] • Assignement de la fitness selon l’indicateur de qualité Qi : • Fitness (x) = Qi (x , P\{x}) • Préservation de la diversité aucune. • Sélection par tournoi binaire. • Opérateurs de recombinaison et mutation. • Remplacement suppression des pires individus et mise à jour des fitness des invididus conservés. • Archive élististe des meilleures solutions rencontrées 11/09/2014 J-C. BOISSON Réunion Dock 16
Résultats de comparaison (1/2) Instances de la base ccdc astex. > meilleur < moins bon ~ non significatif J-C. BOISSON Réunion Dock
Résultats de comparaison (2/2) Instances de la base ccdc astex. Å Angström dst déviation standard J-C. BOISSON Réunion Dock
Plan • Rappel : modèle multi-objectif choisi. • Autre modèles. • Comparaison d’algorithmes génétiques. • Comparaison de configurations d’opérateur. • Résultats. • Perspectives. J-C. BOISSON Réunion Dock
Configurations d’opérateurs J-C. BOISSON Réunion Dock
Plan • Rappel : modèle multi-objectif choisi. • Autre modèles. • Comparaison d’algorithmes génétiques. • Comparaison de configurations d’opérateur. • Résultats. • Perspectives. J-C. BOISSON Réunion Dock
Résultats sur 6 instances • Meilleurs modèles : M4, M5, M7 et M8. Impact positif des objectifs surface et robustesse. Comportement équivalent CVFF et Autodock. • Meilleurs profils : P1, P5 et P6. Apport de l’hybridation. • Globalement, la flexibilité apporte de meilleurs résultats. • RMSD moyen 2,2. J-C. BOISSON Réunion Dock
Plan • Rappel : modèle multi-objectif choisi. • Autre modèles. • Comparaison d’algorithmes génétiques. • Comparaison de configurations d’opérateur. • Résultats. • Perspectives. J-C. BOISSON Réunion Dock
Perspectives • Suite des tests sur la base CCDC-Astex. • Optimisation des meilleurs modèles et profils. • Hybridation avec des recherches locales multi-objectif. • Nouveaux modèles de coopération. J-C. BOISSON Roadef2008
Questions ? J-C. BOISSON Roadef2008
AG : codage d’un individu Site Ligand « docking complex » J-C. BOISSON Réunion Dock
AG: initialisation de la population • Génération du site le même pour tous les individus. • Génération du ligand perturbations aléatoires d’un ligand « graine ». Combinaison de : • Rotation(s) globale(s), • Rotation(s) d’un angle de torsion modification de conformation. J-C. BOISSON Réunion Dock
AG : opérateur de croisement Parents S1 + L1 S2 + L2 Enfants S1 + L2 S2 + L1 J-C. BOISSON Roadef2008
AG : opérateur de mutation Rotation d’un angle de torsion Translation Rotation J-C. BOISSON Roadef2008
PARAllel and DIStributed Evolving Objects ParadisEO EO MO MOEO http://paradiseo.gforge.inria.fr/ EvolvingObject(EO), développement d’algorithme à base de population de solutions: EA, PSO. Moving Objects (MO), mise en place de recherches locales : HC, SA, TS, ILS. Multi-Objective EO (MOEO), développement d’algorithme évolutionnaire multi-objectifs : NSGA-II, IBEA, … ParadisEO (PEO), mise en place de métaheuristiques parallèles. S. Cahon, N. Melab and E-G. Talbi, ParadisEO: A Framework for the Reusable Design of Parallel and Distributed Metaheuristics. Journal of Heuristics, vol. 10(3), pp.357-380, May 2004. A. Liefooghe, M. Basseur, L. Jourdan and E-G. Talbi. ParadisEO-MOEO: A Framework for Multi-Objective Optimization. Proceedings of EMO’2007, pages 457-471, LNCS, Springer-Verlag, 2007. J-C. BOISSON Roadef2008