Download
1 / 13
430 likes | 1.11k Views
Stability analysis of time domain systems. S-Plane: Poles and Zeros . A linear system can be represented by the following transfer function: Zeros: z i (the roots of the numerator) Poles: p i (the roots of the denominator or of the system or characterestic equation).

E N D
S-Plane: Poles and Zeros • A linear system can be represented by the following transfer function: • Zeros: zi (the roots of the numerator) • Poles: pi (the roots of the denominator or of the system or characterestic equation). • Example: for the TF shown below
The Stability of Linear Feedback Systems • In designing a control system, we must be able to predict the dynamic behaviour of the system from knowledge of the components. • A linear time-invariant control system is stable if the output eventually comes back to its equilibrium state when the system is subjected to an initial condition. • It is marginally stable if oscillations of the output continue forever. • It is unstable if the output diverges without bound from its equilibrium state when the system is subjected to an initial condition.
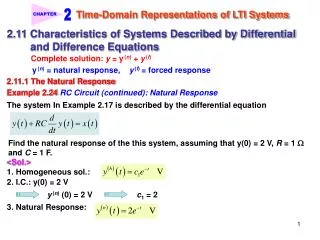
Consider the first-order differential equation: • Time response: y(t) = e-at • There are three cases: i) a > 0, y(∞) = 0 → stable ii) a = 0, y(∞) = 1 → neutral (marginally stable) iii) a < 0, y(∞) = ∞ → unstable
A system is stable if ALL the closed-loop poles are in the LEFT HALF of the s-plane and have negative real parts, i.e. all the roots of the characteristic equation are in the left-hand s-plane. • A general closed-loop system transfer function:
To use the above fact, we need to solve the characteristic equation: • The task of factorising q(s) becomes difficult for n > 2. Do we have an alternative and simple method? • Alternative 1 is • A necessary condition for stability of the system is that all the coefficients of the closed-loop characteristic equation ai are positive. This is to say that if at least one of the coefficients of the characteristic equation q(s) is negative, we can conclude that the system is unstable. • However, it does not mean that if all the coefficients of q(s) are positive, the system is stable. • For example:
Routh-Hurwitz Stability Criterion • Routh's stability criterion tells us whether or not there are unstable roots in the closed-loop characteristic equation without actually solving for them. Using this method, we can tell how many closed-loop system poles are in the right half of the s-plane, but not their exact location. • Consider the closed-loop characteristic equation: • The Routh table is constructed as follows:
Routh-Hurwitz criterion • The Routh-Hurwitz criterion states that the number of roots of q(s) with positive real parts (in right half plane) is equal to the number of sign changes in the first column of the Routh table. • Example: Use the R-H criterion to determine if the closed-loop system described by the following characteristic equation is stable: • Since all the coefficients in the first column of the R-H table are all positive and there is no sign change, then the system is stable.
Exercise: Use the R-H criterion to determine if the closed-loop system described by the following characteristic equation is stable:
Application of Routh's stability criterion in control system analysis • The R-H criterion can be used to determine the range of the parameter values which maintain a stable system. • Example: Consider closed-loop system shown below. Using the R-H criterion, determine the range of K over which the system is stable. • Solution: Closed-loop transfer function:
Routh's table: • For stability, all the coefficients in the first column of the Routh's table must be positive, i.e. we require:
Exercise: Consider closed-loop system shown below. Using the R-H criterion, determine the range of K over which the system is stable.