Download
1 / 16
160 likes | 267 Views
GOES-12 Sounder SFOV sounding improvement. Zhenglong Li, Jun Li, W. Paul Menzel, Timothy J. Schmit and other colleagues Cooperative Institute for Meteorological Satellite Studies University of Wisconsin-Madison. Gauss-Newton Iteration. Classical Gauss-Newton iteration:. Ma ’ s iteration:.

E N D
GOES-12 Sounder SFOV sounding improvement Zhenglong Li, Jun Li, W. Paul Menzel, Timothy J. Schmit and other colleagues Cooperative Institute for Meteorological Satellite Studies University of Wisconsin-Madison
Gauss-Newton Iteration Classical Gauss-Newton iteration: Ma’s iteration: Jun Li’s iteration: retrieval precision Calculation efficiency (Convergence, stability)
Analyze the iteration equation Classical Gauss-Newton iteration: CDRW Covariance matrix of measurements CDR Covariance matrix of state variables Calculated Radiances First guess Measured Radiances Weighting function
Possible improvements • First guess (regression) • Covariance matrix of state variables • Measured Radiances - Noise • Calculated Radiances (RTM) - Bias
First guess Temperature Moisture • New regression is better than old one and forecast • Better first guess could produce better physical retrieval results • This could be wrong if the covariance matrix is not consistent with the first guess
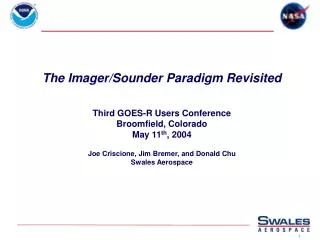
Forecast (Eta) Error GOES Sounder Sounder WV Weighting Functions • New covariance matrices reduce the divergence and instability greatly • New covariance matrices improve the physical retrieval Retrieval (3x3 FOV) Error
Diff btwn obs and cal In New bias estimate: (1) 101-level RTA model is used (2) Surface emissivities are derived from regression based on realistic training Old Bias 14.7 μm 14.7 μm Counts 12.7 μm 12.7 μm • Bias adjustment is needed • Old Bias adjustment is no longer suitable for the new RT model • Noise reduction is needed 7.4 μm 7.4 μm T (K) T (K)
Background and Error Information Traditional Forecast Continue Developing New in this year Error Co-var Objective Forecast Better First Guess Optimal Inverse Algorithm GPS Improved SFOV Moisture Products Temporal Continuity Ecosystem Classified MODIS Emiss Optimal RTA Bias RAOB/GOES Sounder Matchup data Better Handle Clouds Temporal Optimal Radiances Best Validation (RAOB, GPS, MW). Spatial Spectral Radiance Obs Spatial Filtering Temporal Filtering
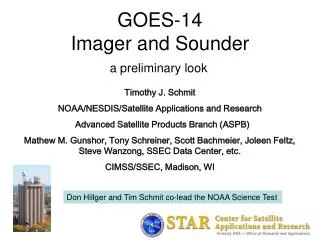
Validation against microwave-retrieved TPW Legacy algorithm is not optimal for SFOV sounding. New gives good SFOV TPW with reasonable precision. Sample # = 3041 Pure SFOV retrieval Lamont, OK Legacy retrieval Legacy retrieval New:Phy1 New:Phy1 New:Phy2 New:Phy2 Phy1: New physical retrieval with regression as first guess Phy2: New Physical retrieval with forecast as first guess
Validation against microwave-retrieved TPW Sample # = 3125 3x3 SFOV retrieval Lamont, OK Simple 3x3 average helps reducing the RMSe of retrieved TPWs Legacy retrieval Legacy retrieval New:Phy1 New:Phy1 New:Phy2 New:Phy2
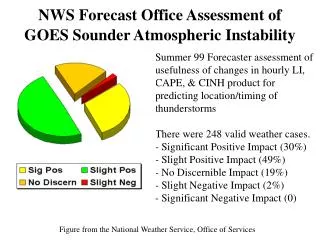
Analysis of RMSe and Bias hourly and seasonally(summer) RMS: < < Legacy Phy2 Phy1 • Phy1 has the smallest bias most of the time in the whole day • Phy2 has negative bias at night and positive bias in the day • Legacy has large positive bias at night and small bias in the day
Analysis of RMSe and Bias hourly and seasonally(winter) RMS: < < Phy2 legacy Phy1 • Phy1 has negative bias most of the time in the whole day • Phy2 has small bias • Legacy has small positive bias at night and large positive bias in the day
Validation against RAOB Sample size = 34 Time: 2005359 00Z to 2005360 00Z RMSe of TPWs (mm) against Raob • GPS helps retrieve moisture • Simple 3 by 3 average helps improve first guess • Phy2 has better results than Phy1 • Covariance matrix should match the first guess (better first guess doesn’t guarantee better retrieval) Reg: regression Phy1: physical retrieval (regression) Fcst: forecast Phy2: physical retrieval (forecast)
Summaries • Single FOV sounding retrievals could be improved through the following aspects: • Forecast helps regression • GPS TPW helps regression • Covariance matrix of state variables • 3x3 simple average • New physical retrieval with regression as first guess is good when TPW is large (summer) • New physical retrieval with forecast as first guess is good when TPW is small (winter)
Future work • New covariance matrices for dry and wet cases • GPS TPW as extra “channel” • Time continuity, Kalman Filter