Download
1 / 110
1.12k likes | 1.24k Views
Diszkrét rendszerek. Y(n) = H [ x(n) ]. Egy olyan rendszert jelent amelynél ha a bemeneten egy vagy több diszkrét X(n) jel van, a rendszer kimenetén is egy vagy több Y(n) diszkrét jel lesz.

E N D
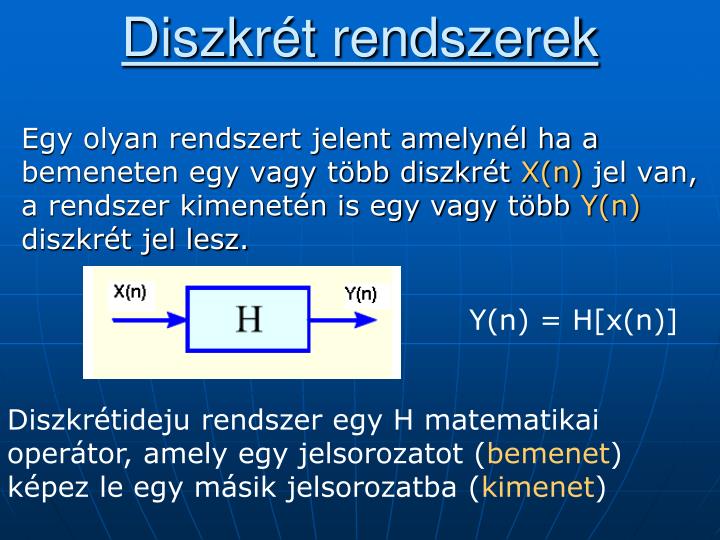
Diszkrét rendszerek Y(n) = H[x(n)] Egy olyan rendszert jelent amelynél ha a bemeneten egy vagy több diszkrét X(n) jel van, a rendszer kimenetén is egy vagy több Y(n) diszkrét jel lesz. Diszkrétideju rendszer egy H matematikai operátor, amely egy jelsorozatot (bemenet) képez le egy másik jelsorozatba (kimenet)
Lineáris, diszkrét, időinvariáns rendszerek (Pl:Digitális szűrők) Egy ilyen rendszer látható a következő ábrán:
Lineáris, diszkrét, időinvariáns rendszerek • Az LDI tulajdonságai: 1. Linearitás Egy diszkrét rendszer lineáris ha a bemeneti jel ax1(n)+bx2(n) akkor a kimeneti jel ay1(n)+by2(n) Ahol a,b tetszőleges konstansok x1(n), x2(n) tetszőleges bemeneti jelek y1(n), y2(n) megfelelő válasz a bemeneti jelekre( kimeneti jelek)
Lineáris, diszkrét, időinvariáns rendszerek 2.Időinvariáns Egy diszkrét rendszer időinvariáns ha a bemeneti jel x(n-i) akkor a kimeneti jel y(n-i) bármilyen i-re Ahol i-egy tetszőleges egész szám x(n) egy tetszőleges bemeneti jel y(n) megfelelő válasz a bemeneti jelekre (kimeneti jelek) A linearitás és az időinvariáns megmagyarázható a következő ábrán (amely csak egy szorozandó tartalmaz)
Lineáris, diszkrét, időinvariáns rendszerek • Az első ábra következőképpen magyarázható: • Tekintsük hogy x(n)=(n) akkor a y(n)=cos(n/2)(n)=cos(0)(n)=(n) • Időeltolást követően a következőt kapjuk ha x(n)=(n-1) akkor a y(n)=cos(n/2)(n-1)=cos(/2)(n-1)=0 és nem a korábban kapott kimeneti jel eltolása.
Lineáris, diszkrét, időinvariáns rendszerek • A második ábra nem lineáris rendszer mutat, mert ha kétszerezzük a bemeneti jelet akkor a kimeneti jel négyszeresét kapjuk. 2x(n) y(n)=2(xn)2 • a hármas ábrán könnyen látható hogy a rendszer lineáris és időinvariáns így tehát -linearitás ha x(n)=(n), akkor a y(n)=A(n) -időinvariáns ha x(n)=(n-1), akkor y(n)=A(n-1)
Lineáris, diszkrét, időinvariáns rendszerek Mint a folytonos rendszereknél a kauzalitás és a stabilitás is nagyon fontos a fizikailag megvalósítható diszkrét rendszereknél. • Kauzalitás: egy diszkrét rendszer kauzális, ha a kimeneti jel nem jelenik meg a bemeneti jel alkalmazása előtt. Azaz ha x(n)=0 n<n0, akkor y(n)=0 n<n0
Lineáris, diszkrét, időinvariáns rendszerek • Stabilitás Egy diszkrét rendszer stabil ha bármilyen amplitudó korlatos bemeneti jel ampilitudó korlátos kimeneti jelet ad. Ha x(n)max A Akkor y(n)max B
Lineáris, diszkrét, időinvariáns rendszerek A fizikailag Megvalósítható Rendszerekhez Csupán három Művelet szükséges: Összeadás, szorzás és időkésleltetés (memorializálás)
Lineáris, diszkrét, időinvariáns rendszerek Ezeknek az elemeknek a segítségével lehet építeni pl. egy kivonó rendszert
Diszkrét rendszer leírása differenciá egyenlettel A kovetező ábrán diszkrét idejű lineáris idő-invariáns rendszer látható, amely a fent felsorolt alapelemek mindegyikét tartalmazza.
Diszkrét rendszer leírása differenciá egyenlettel A fenti rendszer bemeneti és kimeneti jele közötti kapcsolatot az alábbi egyenletekkel írja le: v(n)= ax(n)+bx(n-1)+y(n) és y(n)=cv(n-1) Azok a függvények amelyek egy adott időben (v(n) y(n)) a jel értéke irható függően a jelek korábbi értékei, itt például( x(n-1), v(n-1) neveznek differencia függvények v(n) x(n-1) y(n) v(n-1)
Diszkrét rendszer leírása differenciá egyenlettel • Kombinálni tudjuk a két függvényt (v(n), y(n)) úgy hogy a végén egyetlen differencia függvényt kapunk (lineáris szekvencia), amely csak a korábbi y(n-1), y(n-2)…diszkrét kimeneti értékeket valamint a x(n-1), x(n-2)… korábbi diszkrét bemeneti értékeket tartalmaz. Ha v(n)-t és y(n)-t kombináljuk Akkor y(n)=acx(n-1)+bcx(n-2)+cy(n-1) • Általában tetszőleges bemeneti x(n) jel esetén, a kezdeti feltételek ismeretében a rendszer differencia egyenletével meghatározható a kimenő y(n) jel.
Diszkrét rendszer leírása differenciá egyenlettel Példa: ha x(n)=(n) és y(n)=0 ha n<0 Akkor y(0)=acx(-1)+bcx(-2)+cy(-1)=0 y(1)=acx(0)+bcx(-1)+cy(0)=ac y(2)=acx(1)+bcx(0)+cy(1)=(b+ac)c y(3)=acx(2)+bcx(1)+cy(2)=(b+ac)c2 . . . y(n)=acx(n-1)+bcx(n-2)+cy(n-1)= (b+ac)cn-1 és a kimeneti jel
Diszkrét rendszer leírása differenciá egyenlettel Általában egy LDI rendszer a kimeneti jel y(n) és a bemeneti jel x(n) kapcsolatot magadó funkcióval reprezentálható a következő differencia függvényt. vagy tömörebb formában, a kimenő jelet kifejezve: .
Diszkrét rendszer leírása differenciá egyenlettel Ezt az egyenlet nevezik: lineáris rendszer állandó együtthatós differencia egyenlet. Ha M=0, a rendszer nem rekurzív, vagy mozgó átlagoló. Ez esetben a rendszeregyenlet a gerjesztés-válasz kapcsolattal egyezik meg. Az ilyen rendszerek egyben véges impulzus válaszúak is (FIR rendszer). Ha M0, a rendszer rekurzív továbbá, ha N=0, autoregresszív típusú. A differenciaegyenlet segítségével adott x(n)bemenőjel és ai, biegyütthatók esetén meghatározhatók a kimenőjel y(0), y(1), y(2),…értékei lépésről lépésre módszerrel. E módszert a gyakorlatban csak egyszerű rendszerek és egyszerű bemenő jelek esetén használják.
Diszkrét rendszer leírása differenciá egyenlettel Összetett rendszereknél hosszadalmas és körülményes, ezért diszkrét rendszereknél is általánosan használt megoldási mód a frekvenciatartományba történő transzformáció. A differenciaegyenletek diszkrét esetben is algebrai egyenletekké transzformálódnak, amelyek megoldása jóval egyszerűbb.
Diszkrét rendszer leírása differenciá egyenlettel Példa: Egy differencia egyenlet és egyik a megvalósítási lehetőség
A lineáris idő-invariáns diszkrét rendszerek súlyfüggvénye (impulzusválasza) Egy LDI egyértelműen jellemezhető a Súlyfüggvényével h(n) (Az egységnyi területű Dirac Függvényre (n) adott válaszával) • x(n)=(n) • y(n)=h(n)
A lineáris idő-invariáns diszkrét rendszerek súlyfüggvénye (impulzusválasza) Példa 1: Az ábrából látszik hogy a rendszer súlyfüggvénye a következő: h(n)=2(n)-0.5(n-1) Ez a súlyfüggvény véges (korlátozott) idejű és az ilyen rendszert nevezik véges idejű súlyfüggvény szűrő RIF vagy (véges impulzus válasú szűrő (nem rekurzív)).
A lineáris idő-invariáns diszkrét rendszerek súlyfüggvénye (impulzusválasza) Példa2: Az ábrából látszik hogy a rendszer súlyfüggvénye a következő: h(n)=(-3/4)nU(n-1) Ez a súlyfüggvény végtelen idejű és ezt a rendszert nevezik végtelen idejű súlyfüggvényűnek.(végtelen impulzusválaszú (IIR) szűrő)
A lineáris idő-invariáns diszkrét rendszerek súlyfüggvénye (impulzusválasza) Eddig a mit mondtunk azt követezik hogy a súlyfüggvény h(n) ismeretében lehet számolni a kimeneti jel y(n)-nel ha a bemeneti jel x(n). A következők írhatók le: • a definícióból, ha a bemeneti jel (n) akkor a kimeneti jel h(n) • az időinvariáns tételből következik ha a bemeneti jel (n-i) akkor a kimeneti jel h(n-i) • a linearitás tételből ha a bemeneti jel x(i)(n-i) akkor a kimeneti jel x(i)h(n-i)
A lineáris idő-invariáns diszkrét rendszerek súlyfüggvénye (impulzusválasza) • Ezután kapcsoljunk a bemenetre egy tetszőleges impulzussorozatot: A válaszjel ekkor az alábbi lesz:
A lineáris idő-invariáns diszkrét rendszerek súlyfüggvénye (impulzusválasza) • Röviden: Az LDI rendszer amely súlyfüggvénye h(n) adja, ha a bemeneti jel x(n), akkor a kimeneti jelet y(n) a övetező:
Innen látható hogy a rendszer stabil vagy kauzális: • ha a rendszer stabil akkor h(i) • ha a rendszer kauzális akkor h(n)=0 ha n0
Diszkretconvolució Ha egy diszkrét rendszert időtartományban a súlyfüggvénye (h(n)-a diszkrét Dirac jelre adott válasz) jellemzi, és ha a bemenő jelet x(n)-vel jelöljük, akkor a rendszer válaszát felírhatjuk, mint a bemenő jel és a súlyfüggvény konvolutív szorzatát: Y(n) = x(n)* h(n) A konvolúció segítségével tetszőleges bemenőjelre meg tudjuk határozni a rendszer kimenőjelét, ha a rendszer impulzusválasza ismert, vagy általánosan, ha a fenti három jel közül bármelyik kettő ismert, akkor meghatározható a harmadik.
A konvolúció műveletét a következőképpen definiáljuk: Az egyenlet jobboldalát konvolúciós összegnek nevezzük.
A konvolúció tulajdonságai: Kommutativitás: x(n)*h(n) = h(n)*x(n) vagy másépen: Asszociativitás: (x(n)*h1(n))*h2(n) = x(n)*(h1(n)*h2(n))
Disztributivitás: x(n)*(h1(n)+h2(n)) = x(n)*h1(n) + x(n)*h2(n)
A konvolució a követező grafikus megközelítés szemleleti: 1. x(i) és h(i) sorozatok felrajzolása i függvényében 2. h(i) sorozat tükrözése az ordináta tengelyre (h(-i) 3. h(-i) eltolása n-nel (n > 0 jobbra, n < 0 balra) (pl.: itt n=2) 4.összeadás i-vel y(2)=x(i)h(2-i) 5. x(i) és h(n-i) sorozatok megfelelő elemeinek szorzatösszege adja y(n)-t Végestül: általában N1és N2 hosszúságú sorozatok konvolválásával kapott sorozat hozza N = N1 + N2 - 1
LDI rendszerek leírása az átviteli karakterisztika segítségével A LDI rendszerek jobban leírhatók a frekvencia tartományban (átviteli karakterisztika) mint az időtartományban ( súlyfüggvény). Tekintsünk egy rendszert melynek súlyfüggvénye h(n) és a kimeneti jele y(n) ha a bemeneti jel x(n)=cos(nw) (akkor itt a hn nem a rendszer sülyfüggvénye) x(n)=cos(nw)=ejnw/2+e-jwn/2
LDI rendszerek leírása az átviteli karakterisztika segítségével ha x1(n)= ejnw és x2(n)= e-jwn Akkor és tudjuk hogy ami nem Más mint a diszkrét jelek Fourier transzformáltja
akkor y1(n)= ejwnH(ejw) H(ejw) nem más mint átviteli karakterisztikája az LDI rendszernek amely súlyfüggvénye h(n). A következők írhatók le: y1(n)= ejwnH(ejw)=ejwnAe j=Ae j(wn+) ahol: A=H(ejw) komplex átviteli karakterisztika abszolút értéke és = argH(ejw) a fázis értéke
Ugyan így meghatározhatjuk a kimenetei jel y2(n) ha a bemeneti jelx2(n)=e-jwn , akkor: y2(n)=e-jwnH(e-jw) Használva a lineritás tételt megtudjuk határozni y(n)-t. Ha x(n)=cos(nw)=(x1(n)+x2(n))/2, akkor: y(n)=ejwnH(ejw)+e-jwnH(e-jw)/2
Ha a következő tételeket alkalmazzuk: A(ejw) = A(e-jw) (páros füg.) és (ejw) = -(e-jw) (páratlan füg.) akkor: y(n)=Ae j(wn+) + e -j(wn+)/2 = Acos (wn+) Az eredmény azt mutatja, hogy a DLI rendszerben a bemeneti (itt egy cosinus jel) és a kimeneti frekvenciák azonosak de a kimeneti jel amplitudója és fázisa az átviteli karakterisztikától (H(ejw) függnek ezen a partikuláris frekvencián. Ez az egyik legfontosabb tétel a LDI rendszereknél.
LDI rendszerek leírása az átviteli karakterisztika segítségével Továbbá ha x(n) tetszőleges jel akkor létezik olyan Fourier Transzformáció amely adja inverz FT Azt jelenti, hogy x(n) nem más, mint végtelen exponenciális frekvencia összeadások.
LDI rendszerek leírása az átviteli karakterisztika segítségével A linearitás tételből adódóan az LDI rendszer átfordítja a bemeneti x(n) jelet a kimeneti y(n) jelre, amelyben minden komplex exponenciál szorozva van a hozzátartozó H(ejw)
A konvolúció időtartománybeli tulajdonságai mellett további fontos a frekvenciatartományban érvényes alábbi tulajdonság. Ha adottak a h(n),x(n) és y(n) időfüggvények, Valamint e függvények Fourier-transzformáltjai, H(ejw), X(ejw) és Y(ejw) akkor az időtartománybeli és a frekvenciatartománybeli függvények között az alábbi összefüggés áll fenn:
A fenti összefüggés szerint két függvény konvolúciója meghatározható úgy is, hogy a függvények Fourier transzformáltjait összeszorozzuk,majd a szorzatból inverz FT-val megkapjuk a konvolúció eredményét. Ez lehetőséget ad a konvolúció műveletének egy másik megvalósítására, ami sok esetben megkönnyíti a művelet elvégzését.
LDI rendszerek leírása az átviteli karakterisztika segítségével Megjegyzések: H(ejw) nem más mint a h(n) Fourier transzformáltja. Innen következik hogy H(ejw), mint minden TFSD periodikus, periódusa 2 /T Valós h(n) esetén (a mi átlános), a H valós része szimmetrikus páros és az Imaginárius része pedig szimmetrikus páratlan.
Eddigi bevezetett elméletből következik, hogy, az átviteli karakterisztika meghatározásához, három Módszer kínálkozik: módszer 1: a h(n) sülyfüggvény Fourier transzformáltja, módszer 2: ha a bemeneti jel x(n)=enwT =e nΘ, akkor y(n)= H(e jΘ) e jnΘszámolható az átviteli karakterisztika, modszer 3: a differenciaegyenlet segítségével és használva az időeltolás tétel. x(n-i) e jiΘX(e jΘ) Megjegyzés a bemeneti x(n) jel vonatkozóan : modszer 1: x(n)= δ(n) modszer 2: x(n)= x(n)=enwT modszer 3: nincs definiálva
Példa Határozzuk meg a következő rendszer az átviteli karakterisztikáját. Itt Modszer1: Ha a h(n)=anu(n) Az átviteli karakterisztika a következő: mivel
A konvolúció alkalmazásai A konvolúciót leggyakrabban szűrők megvalósítására használják. Ha ugyanis ismerjük egy jelátviteli tag impulzusválasz függvényét, akkor a kimenőjelet a bemenőjel és az impulzusválasz konvolúciójával meghatározhatjuk. Egy adott specifikációval rendelkező szűrő megvalósításához a megfelelő impulzusválaszt kell megtalálnunk. Ezeket a szűrőket ezért konvolúciós szűrőknek is nevezik.
Fourier transzformáció A diszkrét idejű jelek leírása a frekvencia tartományban (Fourier transzformáció) A Fourier transzformáció, egy tetszőleges x[nT]diszkrét szorozat a következő módon írható le: A folytonos jelek Fourier transzformációja szemben, kétkülönbség figyelhető meg:
Diszkrét Fourier transzformáció 1. Az integrál művelet helyett összegezünk mivel a jelnek csak diszkrét időpillanatokban van értéke. 2. Az w frekvenciaváltozót diszkrét esetben változóval helyettesítettük. Ez kihangsúlyozza azt, hogy X periodikus, periódusa . Emiatt elég az karakterisztika szélességű intervallumát ábrázolnunk, ahogy látható az ábrán. A tartományt alapintervallumnak nevezzük.
Az függvény, mely az x[nT] jel spektruma, komplex függvény, amely vagy a valós és képzetes komponensekkel, vagy az amplitúdóval és a fázisszöggel adható meg: Vagy egyszerűen:
Az inverz Fourier transzformáció Az inverz transzformációs egyenlet: Fourier transzformációs pár
A transzformációt egyszerűbb alakban kapjuk, ha bevezetjük a jelölést, vagy relatív frekvenciát: Fourier transformáció Inverz FT FT pár
A diszkrét idejű jelek Fourier transzformációjának tulajdonságai A transzformáció tulajdonságai azonosak a folytonos jelek Fourier transzformációinál, de figyelembe kell venni, hogy csak a diszkrét időpontokra vannak értelmezve. Linearitás: ahol a és b tetszőleges konstansok. Eltolás az időtartományban:









![Informatikai rendszerek [gyakorlat]](https://cdn3.slideserve.com/6267987/informatikai-rendszerek-gyakorlat-dt.jpg)