Download
1 / 24
240 likes | 552 Views
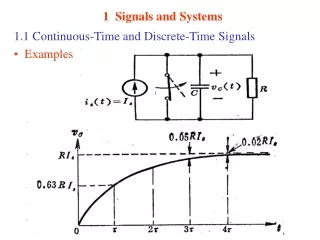
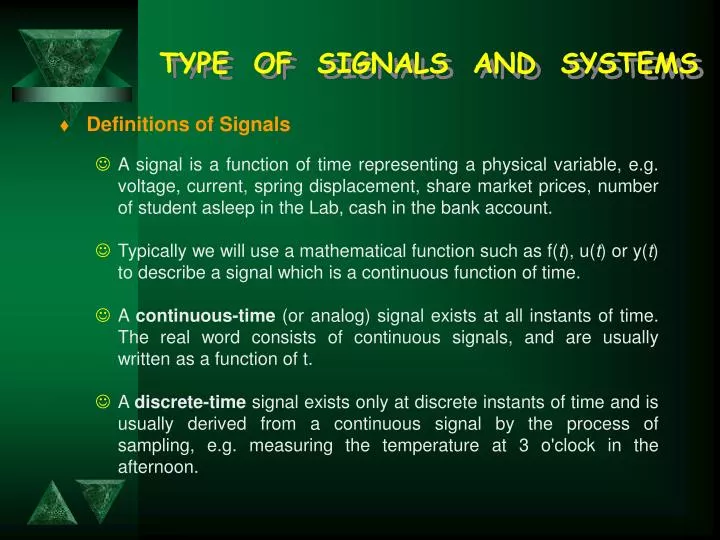
TYPE OF SIGNALS AND SYSTEMS. Definitions of Signals A signal is a function of time representing a physical variable, e.g. voltage, current, spring displacement, share market prices, number of student asleep in the Lab, cash in the bank account.

E N D
TYPE OF SIGNALS AND SYSTEMS • Definitions of Signals • A signal is a function of time representing a physical variable, e.g. voltage, current, spring displacement, share market prices, number of student asleep in the Lab, cash in the bank account. • Typically we will use a mathematical function such as f(t), u(t) or y(t) to describe a signal which is a continuous function of time. • A continuous-time (or analog) signal exists at all instants of time. The real word consists of continuous signals, and are usually written as a function of t. • A discrete-time signal exists only at discrete instants of time and is usually derived from a continuous signal by the process of sampling, e.g. measuring the temperature at 3 o'clock in the afternoon.
TYPE OF SIGNALS AND SYSTEMS • A discrete-time signal is usually (not always) obtained from sampling a continuous signal at a regular time period known as the sampling period, which we will represent by the parameter T. • Thus the discrete-time signal is equal in amplitude to the continuous signal at the sampling instants. (1) • A discrete-time signal is essentially a sequence of numbers (0,1,2, ...) where each of those numbers represents the amplitude of a continuous-time signal at a time equal to kT. • Note that often we neglect to put in the sampling period and write the signal simple as a function of the sample number k.
TYPE OF SIGNALS AND SYSTEMS • A continuous signal is continuous in amplitude. This is continuity in the traditional mathematical sense, i.e. (2) i.e. the amplitude of the signal (function) is continuous. • A discrete signal is discrete in amplitude, i.e. it only has discrete levels • A discrete signal is both discrete in amplitude and in time. • A periodic signal repeats in time, i.e. (3) where P is known as the period. • Note that in the case of discrete-time signal it is usual to describe the period in terms of number of samples before the signal repeats.
TYPE OF SIGNALS AND SYSTEMS • A deterministic signal is known for all time and can be predicted in advance exactly, e.g. a sinewave with known phase. • A random signal cannot be predicted exactly, e.g. weather temperatures. • Random signals are usually dealt with by statistical rather than analytical techniques. • Noise is simply a signal we don't want. • Sometime it is completely random, but on occasions it can be someone else's signal, such as cross-talk on a telephone line. So, since we don't want it we call it noise.
TYPE OF SIGNALS AND SYSTEMS • Example of converting between a continuous and discrete signal. Consider the continuous-time signal (which also happens to be continuous in amplitude) such as (4) The sampling interval T = 0.1 seconds. Start sampling at t = 0 (5)
TYPE OF SIGNALS AND SYSTEMS • We can also write (6) Either method gives i.e. a sequence of number, known as the discrete-time signal. • Note that the values of this sequence depend on the sampling period. • If the sampling interval T were doubled then • Thus a single continuous function can yield an infinite number of sampled sequences, depending on the value chosen for T.
TYPE OF SIGNALS AND SYSTEMS • Definition of System • A system is mathematical model or abstraction of a physical that relates inputs of the physical process to the outputs. Output and inputs are defined in terms of signals. • In general we will use u(t) to represent the input to a system and y(t) to represent its output, although there will be exceptions to this. • The system, which we will write S[], relates the input function u(t) to the output function y(t) (7) where S is some mathematical function. • For example if then • In general systems can also have many inputs and outputs but we will concentrate on the Single Input Single Output (SISO) system
TYPE OF SIGNALS AND SYSTEMS • Linear Systems • Linear systems possess the property of Additivity or Superposition, if and (8) then (9) • Along with superposition of homogeneity. This implies that if , (10) • Thus if we double the input signal, we double the output signal level. • Linear systems satisfy both additivity and homogeneity. If we combine (9) and (10)we can test for both simultaneously, (11)
TYPE OF SIGNALS AND SYSTEMS • For example : fails both homogeneity, since (12) and additivity since if and (13) then the condition required for additivity (14) does not hold.
TYPE OF SIGNALS AND SYSTEMS • TIME INVARIANT SYSTEMS A time invariant system has parameters which are independent of time. Expressing this mathematically, if (15) then (16) for a time variant system. Thus any system is involving switches or having a time varying parameters is not time invariant. A simple example of a time varying system is a system where the gain is equal to the time t. As an example consider a system where (17) where the input is a pulse.
u (t) y(t) S [ ] u (t - ) TYPE OF SIGNALS AND SYSTEMS The diagram below show how that delaying the pulse causes the output to not only be delayed but also changed in shape and amplitude. As a consequence the system is not time invariant. We will nearly always consider time invariant systems. In reality nearly all systems are time varying when one considers a sufficiently long period, but can often be approximated over the period of interest by a time-invariant system. Note that when dealing with a discrete signal the sample number k is a function of time since where T is the sampling period. Thus the discrete system is also time varying. (18)
TYPE OF SIGNALS AND SYSTEMS • LINEAR TIME INVARIANT (LTI) SYSTEMS • If a system is both linear and time invariant then we call it a linear time invariant system. Most of the techniques for analysing systems in this study rely on the system being (LTI) or a close approximation. • In practice analysis based on assuming a LTI is very powerful, because - it is good approximation to most real word systems - it is easy to analyse and obtain results - it is easy to predict its behaviour
TYPE OF SIGNALS AND SYSTEMS • CAUSAL SYSTEM • No real word system can have an output which precedes the input, e.g. is a causal system. is an anti-causal system because the value of y(t) at time t = 0 depends on the value of x(t) at time t = 14, i.e. at some time in the future. • A bank account is an example of a causal system since before the system gives you an output (interest) you have to insert an input (i.e. deposit). Banks do not give interest on money that you have yet to deposit and thus are firm believers in causality.
R i(t) +vo C e(t) TYPE OF SIGNALS AND SYSTEMS • RESISTOR-CAPACITOR NETWORK • i(t) is input signal, a current varying with time, e(t) is output, a voltage varying with time. We changed notation of input and output from u(t) and y(t) into i(t) and e(t) respectively. • Both i(t) and e(t) are examples of signals and could be sinewaves, square waves, exponential, etc. The system is the resistor and capacitor and wires connecting them.
TYPE OF SIGNALS AND SYSTEMS • In reality, over the years the resistance and capacitance may change slightly and strictly speaking the system is time varying. • In practice, we are interested in a much shorter time span and during that time the resistance and capacitance will not change significantly. • It is therefore a reasonable approximation to say the system is time invariant.
TYPE OF SIGNALS AND SYSTEMS • Now input : • Thus strictly speaking the system is only linear if is equal to zero.
SIGNAL POWER • ENERGY and POWER in a SIGNAL • In electrical systems the signal is usually a voltage or current. Most other signals are converted to a voltage or current through a transducer. • The energy dissipated by a resistance R during a given time interval between and is, unit E is Joules, if V is in Volts and R is in Ohms. • Some signals go on (practically) forever and so the integral in above equation becomes infinite, as an example sin(t) is a function of infinite energy.
SIGNAL POWER • In order to deal with signals such as this we use the concept of power of a signal. When voltage V(t) is applied to a resistance its power is given by where W has been used to represent Watt and to avoid confusing with using P which indicates the period of a signal. • In signal processing theory it is common to use the term "Energy" to refer to the quantity and "Power" to refer to the quantity
SIGNAL POWER • If x(t) was a voltage we would need to divide by R to obtain the true energy (or power), whilst if x(t) was a current we would need to multiply by R. • In practice, the R term is a constant can be safely left until the end, whereupon if x(t) is actually a voltage or a current we can introduce it to obtain the real energy or power. • If x(t) is a share price, thus the above equations are common make sense, with reckless disregard for wether we should multiply, divide by or ignore the resistance. • Thus if the signal is said to be of finite power.
SIGNAL POWER • Power in a Sinwave where P is period of the sinwave. The period can be taken from to or to • Usually we take the former as it often makes the mathematics easier.
SIGNAL POWER Note the following points : - The power is not a function of the period - The power is not a function of the phase This is easy to show by redoing the calculation for - The power (in the signal theory sense) is the square of the RMS value of a sinewave
SIGNAL POWER • The Decibel • The ITU-T define the decibel in CCIR Rec 574 as follows : • The bel (symbol B) expresses the ratio of two powers by the decimal logarithmic of this ratio. This unit is not often used, having been replaced by decibel (dB) which is one-tenth of a bel. • The decibel may be used to express the ratio of two field quantities, such as voltage, current, sound pressure, electric field, charge velocity or density, the square of which linear system is proportional to power. • To obtain the same numerical value as a power ratio, the logarithm of the field quantity ratio is multiplied by the factor 20, assuming that the impedances are equal.
SIGNAL POWER • The relationship between a current or voltage ratio and that of the corresponding power ratio is impedance dependent. • Use of the decibel when the impedances are not equal is not appropriate unless adequate information is given concerning the impedances involved. • For example, if P1 and P2 are two powers, the ratio expressed in decibels is : • If P1 and P2 represent the powers dissipated by current I1 and I2 in resistances R1 and R2. In this case, the logarithm of this ratio must be
SIGNAL POWER • The important point to note is that the decibel expresses a ratio of two powers. It is not a unit of power. • When a value of power is quoted in logarithmic terms, the reference power must also be quoted. • For example, if the reference power is 1 miliwatt (mW), power values are often quoted in dBm, where the suffix "m" means referred to a power of 1 mW. Thus, "8 dBm" means the ratio of the measured power to 1 mW is 8 dB.