Download
1 / 48
520 likes | 743 Views
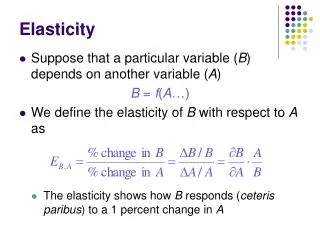
Nonlinear Elasticity. Outline. Some basics of nonlinear elasticity Nonlinear elasticity of biopolymer networks Nematic elastomers. What is Elasticity. Description of distortions of rigid bodies and the energy, forces, and fluctuations arising from these distortions.

E N D
Nonlinear Elasticity Princeton Elasticity Lectures
Outline • Some basics of nonlinear elasticity • Nonlinear elasticity of biopolymer networks • Nematic elastomers Princeton Elasticity Lectures
What is Elasticity • Description of distortions of rigid bodies and the energy, forces, and fluctuations arising from these distortions. • Describes mechanics of extended bodies from the macroscopic to the microscopic, from bridges to the cytoskeleton. Princeton Elasticity Lectures
Classical Lagrangian Description Reference material in D dimensions described by a continuum of mass points x. Neighbors of points do not change under distortion Material distorted to new positions R(x) Cauchy deformation tensor Princeton Elasticity Lectures
Linear and Nonlinear Elasticity Linear: Small deformations – L near 1 Nonlinear: Large deformations – L >>1 • Why nonlinear? • Systems can undergo large deformations – rubbers, polymer networks , … • Non-linear theory needed to understand properties of statically strained materials • Non-linearities can renormalize nature of elasticity • Elegant an complex theory of interest in its own right • Why now: • New interest in biological materials under large strain • Liquid crystal elastomers – exotic nonlinear behavior • Old subject but difficult to penetrate – worth a fresh look Princeton Elasticity Lectures
Deformations and Strain Complete information about shape of body in R(x)= x +u(x); u= const. – translation no energy. No energy cost unless u(x) varies in space. For slow variations, use the Cauchy deformation tensor Volume preserving stretch along z-axis Princeton Elasticity Lectures
Simple shear strain Constant Volume, but note stretching of sides originally along x or y. Note: L is not symmetric Rotate Not equivalent to Princeton Elasticity Lectures
Pure Shear Pure shear: symmetric deformation tensor with unit determinant – equivalent to stretch along 45 deg. Princeton Elasticity Lectures
Pure shear as stretch Princeton Elasticity Lectures
Pure to simple shear Princeton Elasticity Lectures
Cauchy Saint-Venant Strain R=Reference space T=Target space uab is invariant under rotations in the target space but transforms as a tensor under rotations in the reference space. It contains no information about orientation of object. Symmetric! Princeton Elasticity Lectures
Elastic energy The elastic energy should be invariant under rigid rotations in the target space: if is a function of uab. This energy is automatically invariant under rotations in target space. It must also be invariant under the point-group operations of the reference space. These place constraints on the form of the elastic constants. Note there can be a linear “stress”-like term. This can be removed (except for transverse random components) by redefinition of the reference space Princeton Elasticity Lectures
Elastic modulus tensor Kabcdis the elastic constant or elastic modulus tensor. It has inherent symmetry and symmetries of the reference space. Isotropic system Uniaxial (n = unit vector along uniaxial direction) Princeton Elasticity Lectures
Isotropic and Uniaxial Solid Isotropic: free energy density f has two harmonic elastic constants m = shear modulus; B = bulk modulus Uniaxial: five harmonic elastic constants Princeton Elasticity Lectures
Force and stress I external force density – vector in target space. The stress tensor sia is mixed. This is the engineering or 1st Piola-Kirchhoff stress tensor = force per area of reference space. It is not necessarily symmetric! sabIIis thesecond Piola-Kirchhoff stress tensor - symmetric Note: In a linearized theory, sia = siaII Princeton Elasticity Lectures
Cauchy stress The Cauchy stress is the familiar force per unit area in the target space. It is a symmetric tensor in the target space. Symmetric as required Princeton Elasticity Lectures
Coupling to other fields We are often interested in the coupling of target-space vectors like an electric field or the nematic director to elastic strain. How is this done? The strain tensor uab is a scalar in the target space, and it can only couple to target-space scalars, not vectors. Answer lies in the polar decomposition theorem Princeton Elasticity Lectures
Target-reference conversion To linear order in u, Oia has a term proportional to the antisymmetric part of the strain matrix. Princeton Elasticity Lectures
Strain and Rotation Simple Shear Symmetric shear Rotation Princeton Elasticity Lectures
Sample couplings Coupling of electric field to strain Free energy no longer depends on the strain uab only. The electric field defines a direction in the target space as it should Energy depends on both symmetric and anti-symmetric parts of h’ Princeton Elasticity Lectures
Biopolymer Networks cortical actin gel neurofilament network Princeton Elasticity Lectures
Characteristics of Networks • Off Lattice • Complex links, semi-flexible rather than random-walk polymers • Locally randomly inhomogeneous and anisotropic but globally homogeneous and isotropic • Complex frequency-dependent rheology • Striking non-linear elasticity Princeton Elasticity Lectures
Goals • Strain Hardening (more resistance to deformation with increasing strain) – physiological importance • Formalisms for treating nonlinear elasticity of random lattices • Affine approximation • Non-affine Princeton Elasticity Lectures
Different Networks Max strain ~.25 except for vimentin and NF Max stretch: L(L)/L~1.13 at 45 deg to normal Princeton Elasticity Lectures
Semi-microscopic models Random or periodic crosslinked network: Elastic energy resides in bonds (links or strands) connecting nodes Rb = separation of nodes in bond b Vb(| Rb |) = free energy of bond b nb = Number of bonds per unit volume of reference lattice Princeton Elasticity Lectures
Affine Transformations Strained target network: Ri=LijR0j Reference network: Positions R0 Depends only on uij Princeton Elasticity Lectures
Example: Rubber Purely entropic force Average is over the end-to-end separation in a random walk: random direction, Gaussian magnitude Princeton Elasticity Lectures
Rubber : Incompressible Stretch Unstable: nonentropic forces between atoms needed to stabilize; Simply impose incompressibility constraint. Princeton Elasticity Lectures
Rubber: stress -strain AR= area in reference space Engineering stress Physical Stress A = AR/L = Area in target space Y=Young’s modulus Princeton Elasticity Lectures
General Case Engineering stress: not symmetric Central force Physical Cauchy Stress: Symmetric Princeton Elasticity Lectures
Semi-flexible Stretchable Link t = unit tangent v = stretch Princeton Elasticity Lectures
Length-force expressions L(t,K) = equilibrium length at given t and K Princeton Elasticity Lectures
Force-extension Curves Princeton Elasticity Lectures
Scaling at “Small” Strain Theoretical curve: calculated from K-1=0 zero parameter fit to everything G'/G' (0) Strain/strain8 Princeton Elasticity Lectures
What are Nematic Gels? • Homogeneous Elastic media with broken rotational symmetry (uniaxial, biaxial) • Most interesting - systems with broken symmetry that develops spontaneously from a homogeneous, isotropic elastic state Princeton Elasticity Lectures
Examples of LC Gels 1. Liquid Crystal Elastomers - Weakly crosslinked liquid crystal polymers Nematic Smectic-C 2. Tanaka gels with hard-rod dispersion 3. Anisotropic membranes 4. Glasses with orientational order Princeton Elasticity Lectures
Properties I • Large thermoelastic effects - Large thermally induced strains - artificial muscles Courtesy of Eugene Terentjev 300% strain Princeton Elasticity Lectures
Properties II Large strain in small temperature range Terentjev Princeton Elasticity Lectures
Properties III • Soft or “Semi-soft” elasticity Vanishing xz shear modulus Soft stress-strain for stress perpendicular to order Warner Finkelmann Princeton Elasticity Lectures
Model for Isotropic-Nematic trans. m approaches zero signals a transition to a nematic state with a nonvanishing Princeton Elasticity Lectures
Spontaneous Symmetry Breaking Phase transition to anisotropic state asmgoes to zero Direction ofn0is arbitrary Symmetric- Traceless part Princeton Elasticity Lectures
Strain of New Phase u’ is the strain relative to the new state at pointsx’ duis the deviation of the strain relative to the original reference frameR fromu0 duis linearly proportional tou’ Princeton Elasticity Lectures
Elasticity of New Phase Rotation of anisotropy direction costs no energy C5=0 because of rotational invariance This 2nd order expansion is invariant under all U but only infinitesimal V Princeton Elasticity Lectures
Soft Extensional Elasticity Strain uxx can be converted to a zero energy rotation by developing strains uzz and uxzuntil uxx =(r-1)/2 Princeton Elasticity Lectures
Frozen anisotropy: Semi-soft System is now uniaxial – why not simply use uniaxial elastic energy? This predicts linear stress-stain curve and misses lowering of energy by reorientation: Model Uniaxial system: Produces harmonic uniaxial energy for small strain but has nonlinear terms – reduces to isotropic when h=0 f (u) : isotropic Rotation Princeton Elasticity Lectures
Semi-soft stress-strain Ward Identity Second Piola-Kirchoff stress tensor. Princeton Elasticity Lectures
Semi-soft Extensions Break rotational symmetry Stripes form in real systems: semi-soft, BC Not perfectly soft because of residual anisotropy arising from crosslinking in the the nematic phase - semi-soft. length of plateau depends on magnitude of spontaneous anisotropyr. Warner-Terentjev Note: Semi-softness only visible in nonlinear properties Finkelmann, et al., J. Phys. II 7, 1059 (1997); Warner, J. Mech. Phys. Solids 47, 1355 (1999) Princeton Elasticity Lectures
Softness with Director Na= unit vector along uniaxial direction in reference space; layer normal in a locked SmA phase Red: SmA-SmC transition Director relaxes to zero Princeton Elasticity Lectures