Download
1 / 16
160 likes | 354 Views
Project Status Update P10661-Aerial Imaging. www.storaenso.com. Dale Turley (Mechanical Engineering). Project Status Update. Project Name Aerial Imaging System Project Number P10661 Project Family Open Architecture, Open Source Aerial Imaging Systems

E N D
Project Status UpdateP10661-Aerial Imaging www.storaenso.com Dale Turley (Mechanical Engineering)
Project Status Update • Project Name Aerial Imaging System • Project Number P10661 • Project Family Open Architecture, Open Source Aerial Imaging Systems • Track Printing and Imaging • Start Term 2010-1 planned academic quarter for MSD1 • End Term 2010-2 planned academic quarter for MSD2 • Faculty Guide Dr. Pratapa Reddy, Professor in Computer Engineering • Tech Support Mike Walsh • Primary Customer Dr. Carl Salvaggio, College of Imaging Science
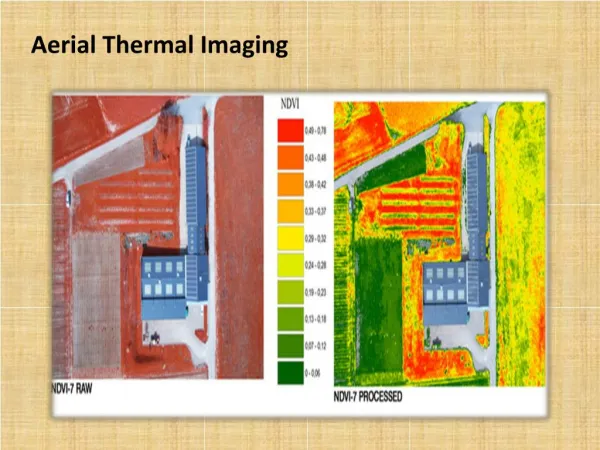
Mission Statement The overall product is a visible spectrum imaging system for the use with an unmanned aerial vehicle. The specific task under development is an image calibration system and procedure to be used by researchers in the College of Imaging Science, to effectively and efficiently collect aerial data. • Key Business Goals: • This product is to replace existing data collection methods. • To give the customer the ability to launch and collect data on-demand and to choose the usage based on specific situations. • Reduce the cost associated with current collection processes. • Pre-processing of images will eliminate the need for expensive and timely post-processing in a lab.
Markets/Stakeholders Primary Customer: The primary market for this product is the RIT College of Imaging Science. Secondary Markets: Secondary markets for this imaging system may include emergency response agencies where the product could be applied for search & rescue or in firefighting. Law enforcement agencies could use this product for drug eradication. • Stakeholders: • R09560 - Open Architecture, Open Source Aerial Imaging Systems • College of Imaging Arts and Sciences • Kate Gleason College of Engineering • Law Enforcement Agencies • Fire Departments • Public Safety
Current State of Design Camera Controls and Power Vibration Isolation System Images from P09561 Design Review Presentation
Customer Interview • Dr. Carl Salvaggio - Primary Customer • Imaging scientists are always starved for data • Current data collection systems use manned aircraft which are very expensive and logistically inconvenient • System needs to be robust enough to accompany different spectral imaging devices • Type of image depends on the mission • System needs to be small and light enough to be carried by RIT UAV(unmanned aerial vehicle) • Calibration can allow for imaging scientists to measure energy directly from an image to interpret data immediately • On-board calibration will ultimately increase data quality and decrease cost associated with the equipment
P09561 P10661 Phase 3 Phase 4 Aerial Imaging System Aluminum Platform (include calibration device) Aluminum Platform (includes DAQ + power) Composite Platform Cost and Mass Reduction Platform Active Vibration Control Cost and Mass Reduction Vibe Control Passive Vibration Control Multi-Spectral Cameras Visible & Thermal IR Visible Spectrum Camera Ground Based On-board Visible Calibration On-Board Thermal IR Calibration Calibration Preliminary Roadmap Short range Wireless No Wireless Interface Long Range RF Down Link Wireless
Objective Tree UAV Imaging System Structure Scope Economics Technical Mechanical Engineering Imaging Science Robust Useful for researchers Useful for public safety agencies Low production cost Rugged Measurements Observation Information Frame Imaging Theory Low usage cost Electrical Engineering Computer Engineering Inexpensive Low maintenance cost Software Simple Power Storage
Function Tree UAV Imaging System Calibration Data Storage Software System Hardware System Quality of Data Processing Power Capacity Reliability Camera System Software System Camera Controls Subsystem Controls User Interface Visible Thermal IR Short Wave Long Wave Stable Power Provide Power for Entire Flight
Preliminary House of Quality Relative Importance Results:
Future Plans • Continue to build on needs, interpreting needs, and identifying relative importance • Observe parent MSD2 team • Lessons learned • Advice • Meet with other individuals important to the project • Jason Faulring (computer engineering grad student) • Jan VanAardt (head of Laboratory for Imaging Algorithms and Systems) • Attend RIT Innovation Festival • Attend P09561 design review • Develop action plan for MSD1 to address how the team will engage the design process • Concept development • Sanity check
Sources https://edge.rit.edu/content/P09561/public/Home https://edge.rit.edu/content/R09560/public/Home