Industrial Robotics
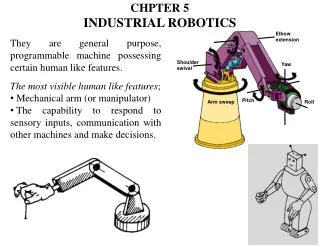
Industrial Robotics. Chapter 8. Introduction. Industrial robot คือ เครื่องจักรที่สามารถโปรแกรมได้ ซึ่งมีลักษณะคล้ายมนุษย์ The most anthropomorphic characteristic คือ แขนกล ซึ่งใช้ทำงานหลายๆ อย่างในอุตสาหกรรม

Industrial Robotics
E N D
Presentation Transcript
Industrial Robotics Chapter8 Industrial Robotics
Introduction • Industrial robot คือ เครื่องจักรที่สามารถโปรแกรมได้ ซึ่งมีลักษณะคล้ายมนุษย์ • The most anthropomorphic characteristic คือ แขนกล ซึ่งใช้ทำงานหลายๆ อย่างในอุตสาหกรรม • Other human-like characteristics คือ มันสามารถตอบสนองต่อข้อมูลนำเข้า และสื่อสาร กับเครื่องจักรชนิดอื่น และตัดสินใจได้ด้วย Industrial Robotics
Introduction • การพัฒนาของเทคโนโลยี Robotic ก้าวตามการพัฒนาของ Numerical control • และเกี่ยวกับการควบคุม Coordinated ของหลายๆแกน (multipleaxes;axes คือ ข้อต่อของ Robotics) • Typical production application เช่น การเชื่อมจุด, การขนส่งวัสดุ, การ load งานเข้าเครื่องจักร, การพ่นสี และงานประกอบ Industrial Robotics
Introduction • Reason for application robot in industrial • Robot สามารถทำงานแทนคนในที่สิ่งแวดล้อมไม่เหมาะสมหรืออันตราย • Robot สามารถทำงานในแต่ละ work cycle ที่ซ้ำกันโดยให้ผลการทำงานใกล้เคียงหรือเท่ากันในแต่ละรอบ • Robot สามารถทำการโปรแกรมได้ เมื่อกระบวนการผลิตในปัจจุบันเสร็จสมบูรณ์แล้ว robot สามารถป้อนโปรแกรมใหม่เพื่อทำงานที่แตกต่างได้ • Robot ควบคุมด้วยคอมพิวเตอร์ และเชื่อมต่อกับระบบคอมพิวเตอร์ระบบอื่น เพื่อเป็น computer integrated. Industrial Robotics
Robot anatomy and related attributes • Industrial robot สร้างมาจาก series of joint และ links • Robot anatomy สัมพันธ์กับ ชนิด และขนาดของ joint และ links เหล่านี้ • นอกจากนี้ยังมีโครงสร้างทางกายภาพในด้านอื่นๆ ของหุ่นยนต์อีกด้วย Industrial Robotics
Joint and links • Joint ofindustrial robot คล้ายกับข้อต่อในร่างกายมนุษย์ ทำให้เกิดการเคลื่อนที่สัมพันธ์ระหว่าง 2 ชิ้นส่วนของร่างกาย • แต่ละ joint เรียกว่า degree-of-freedom (d.o.f.) ของการเคลื่อนที่ (เพียง 1 d.o.f. สัมพันธ์กับ 1 joint) • Robot ถูกแยกประเภทตามจำนวนของ d.o.f. • การเชื่อมต่อของแต่ละ joint มี 2 links คือ input link และ output link Industrial Robotics
Joint and links • การทำงานของ Joint เพื่อให้มีการควบคุมความสัมพันธ์ระหว่าง input link และ output link • Robot ส่วนมากแล้วจะยึดติดกับฐานที่อยู่กับที่และมีความมั่นคงซึ่งยึดติดกับพื้น • ฐาน ซึ่งเชื่อมต่อกับ joint แรก เป็น link 0 มันเป็น input link ให้กับ joint 1 • Output link ของ joint 1 คือ link 1 และ link 1 เป็น input link ให้กับ joint 2 ไปเรื่อยๆ ดังรูป Industrial Robotics
Joint and links Industrial Robotics
Joint and links • The five joint types are: • Linear joint (type L joint)การเคลื่อนที่สัมพัทธ์ระหว่าง input link และ output link เป็นแบบสไลด์เลื่อนไปมา ซึ่งแกนทั้ง 2 link ขนานกัน Industrial Robotics
Joint and links • The five joint types are: • Orthogonal joint (type O joint)การเคลื่อนที่เป็นแบบสไลด์เลื่อน แต่ input link และ output link อยู่ในลักษณะตั้งฉากกันในขณะมีการเคลื่อนที่ Industrial Robotics
Joint and links • The five joint types are: • Rotational joint (type R joint) ข้อต่อแบบนี้จะทำให้เกิดการเคลื่อนที่ซึ่งมีการหมุน โดยแกนของการหมุนตั้งฉากกับแกนของ input link และ output link Industrial Robotics
Joint and links • The five joint types are: • Twisting joint (type T joint) เป็นการเคลื่อนที่แบบหมุนเช่นกัน แต่แกนของการหมุนขนานไปกับแกนของ link ทั้งสอง Industrial Robotics
Joint and links • The five joint types are: • Revolving joint (type V joint) แกนของ input link ขนานกับแกนการหมุนของข้อต่อ และแกนของ output link ตั้งฉากกับแกนของการหมุน Industrial Robotics
Common robot configuration • Robot สามารถแบ่งออกเป็น 2 ส่วนสำคัญ: body-and-arm assembly และ ส่วน wrist (ข้อมือ) โดยมากส่วนลำตัวและแขนจะมี 3 d.o.f. • ข้อมือ เป็นเครื่องมือที่ต้องมีความสัมพันธ์กับงาน เครื่องมือนี้ เรียกว่า end effector โดยปกติเป็นทั้ง • Gripper สำหรับจับถือ workpart หรือ • เครื่องมือสำหรับใช้ในกระบวนการผลิตบางอย่าง Industrial Robotics
Common robot configuration • body-and-arm configuration • เมื่อมีข้อต่อ 5 แบบ เราจะได้การ joint ที่แตกต่างกัน 5x5x5=125 ซึ่งเป็นการออกแบบ robot ที่มี body-and-arm สำหรับ 3 d.o.f. • นอกจากนี้ยังมีการออกแบบความแตกต่างสำหรับ joint แต่ละชนิ • รูปร่างของ robot ที่ใช้กันในอุตสาหกรรมมีอยู่ 5 ชนิด Industrial Robotics
Common robot configuration • Polar configurationประกอบด้วย arm ที่สไลด์ได้ (L joint),body หมุนรอบแกนดิ่ง (T joint) และแกนระดับ (R joint) คือ TRL Industrial Robotics
Common robot configuration • Cylindrical configurationประกอบด้วย เสากลมวางในแนวแกนตั้งซึ่งหมุนได้ (T joint),arm สามารถเลื่อนขึ้นลงได้(L joint), arm สามารถเคลื่อนเข้าออกได้ (O joint) คือ TLO Industrial Robotics
Common robot configuration • Cartesian coordinate robotอาจเรียกว่า rectilinear robot และ x-y-z robot เป็นการรวม joint ซึ่งสไลด์ได้ ทั้ง 3 joint โดยจะมี 2 joint เป็นแบบ orthogonal เช่น LOO Industrial Robotics
Common robot configuration • Jointed-arm robotจะมีลักษณะคล้ายแขนคน ประกอบด้วย ฐานเป็นแบบหมุน (T joint) joint ต่อไปเป็น shoulder joint, R joint (ข้อต่อบ่า) และ elbow joint, R joint (ข้อศอก) คือ TRR Industrial Robotics
Common robot configuration • SCARAคล้าย jointed arm robot ยกเว้น shoulder and elbow หมุนในแกนตั้ง ทำงานเกี่ยวกับการใส่ของเข้าไปในที่ว่างในสายงานประกอบ คือ VRO Industrial Robotics
Common robot configuration • Wrist configuration • ข้อมือของ robot ประกอบด้วย 2 หรือ 3 d.o.f.ตัวอย่างต่อไปนี้เป็นรูปแบบการประกอบข้อมือของ robot แบบ 3 d.o.f. • Roll ใช้ T joint เพื่อจะหมุนวัตถุรอบแกนของแขน • Pitch เกี่ยวกับการหมุนขึ้น-ลงของวัตถุ (R joint) • Yaw เกี่ยวกับการหมุนซ้าย-ขวาของวัตถุ (R joint) Industrial Robotics
Common robot configuration Industrial Robotics
Common robot configuration • Joint nation system • เราสามารถใช้อักษรแทน joint ทั้ง 5 ชนิด (L, O, R, T and V) เพื่อกำหนด joint nation system • ใช้ในการอธิบายชนิดของ joint สำหรับการประกอบ body-and-arm ของ robot • ตัวอย่าง TLR:TR แสดง 5 d.o.f • body-and-arm, twisting joint(joint 1=T),linear joint (joint 2=L),rotational joint (joint 3=R) • ข้อมือ ประกอบด้วย 2 joint, twisting joint (joint 4=T) and rotation joint (joint 5=R) Industrial Robotics
Common robot configuration • Work volume (work envelope) • หมายถึง กรอบหรือเนื้อที่ซึ่งปลายข้อมือ ของ robot เหยียดไปถึงได้ • ถูกกำหนดโดยจำนวนและชนิดของ joint • รูปร่างของ work volume ขึ้นกับโครงร่างของ robot เช่น Polar configuration robot เป็น รูปทรงกลมCylindrical robot เป็นรูปทรงกระบอก และ Cartesian coordinate robot เป็นรูปสี่เหลี่ยมผืนผ้า Industrial Robotics
Joint drive systems • Robot joint มีระบบขับเคลื่อนได้ดังต่อไปนี้ • Electric ใช้มอเตอร์ไฟฟ้าเป็นตัวขับเคลื่อน เป็น robot ที่ผลิตมาขายในปัจจุบัน เพราะการควบคุมแบบนี้จะต่อเข้ากับระบบคอมพิวเตอร์ควบคุม และมีความแม่นยำในการทำงานมาก • Hydraulic ใช้ใน robot ที่มีการทำงานซับซ้อน ในด้านของความเร็วและกำลัง ดีกว่าชนิดอื่น • Pneumatic ใช้กับ robot ขนาดเล็ก ทำงานขนส่งวัสดุแบบง่ายๆ Industrial Robotics
Robot control system • Hardware ของระบบควบคุมในปัจจุบันใช้ controller ที่มีส่วนประกอบของ microprocessor • โครงสร้างของตัวควบคุมจะถูกออกแบบให้เป็นลำดับชั้นดังรูป Industrial Robotics
Robot control system • การควบคุมที่แตกต่างกันสำหรับการใช้งานที่แตกต่าง แบ่งออกเป็น 4 ประเภท • Limited sequence control • ใช้กับงานที่มีรอบการเคลื่อนที่แบบง่าย เช่น pick and place • ใช้งานโดยการตั้งจุดหยุด หรือ จุดหยุดทางกล ให้แก่แต่ละ joint และจัดลำดับการทำงานของ joint • Robot ที่ขับเคลื่อนด้วย pneumatic ส่วนมากจะเป็นชนิดนี้ Industrial Robotics
Robot control system • Playback with point-to-point control • Play back control หมายถึง controller มีหน่วยความจำสำหรับบันทึกลำดับการเคลื่อนที่และตำแหน่งของการเคลื่อนที่ ใน work cycle • ในการควบคุม point-to-point (PTP) แต่ละตำแหน่งของ robot arm ถูกบันทึกในหน่วยความจำ • มีการนำเอาการควบคุมป้อนกลับมาใช้ระหว่างรอบการเคลื่อนที่ของ Robot ด้วย Industrial Robotics
Robot control system • Playback with continuous path control • เหมือนแบบที่แล้วแต่จุดที่ประกอบเป็นเส้นทางมีความละเอียดมากขึ้น • Robot เคลื่อนที่เรียบขึ้น • Intelligent control • Robot ที่สามารถแสดงพฤติกรรมออกมาว่าดูเสมือนว่าฉลาด Industrial Robotics
Robot control system • ลักษณะที่แสดงว่ามันฉลาด คือ • มีปฏิกิริยาตอบสนองต่อสิ่งแวดล้อม • สามารถตัดสินใจถ้ามีสิ่งบกพร่องระหว่าง work cycle • สื่อสารกับมนุษย์ได้ • มีการคำนวณระหว่างรอบการเคลื่อนที่ • สามารถทำงานร่วมกับอุปกรณ์อื่นๆ ได้ Industrial Robotics
End Effectors • เราเรียกเครื่องมือและตัวจับโหลดว่า End effectors • End effectors โดยทั่วไปเป็น robot’s wrist ซึ่งทำให้ robot สามารถทำงานเฉพาะบางอย่างได้ • เนื่องจากว่า industrial robot จะต้องทำงานที่แตกต่างกันหลายๆ ชนิด • จะต้องออกแบบ end effects ให้เหมาะสมกับการทำงานลักษณะนั้น • End effectors มี 2 ชนิด คือ grippers and tools Industrial Robotics
Gripper • เป็น end efffector ชนิดหนึ่งใช้จับและย้ายชิ้นงานระหว่าง work cycle • Machine loading and unloading เป็นการใช้งานโดย gripper • รูปร่างของ part, ขนาด และน้ำหนัก เป็นได้หลากหลาย • ชนิดของ gripper ที่ใช้กันในอุตสาหกรรม มีดังนี้ • Mechanical gripper • Vacuum gripper • Magnetized device Industrial Robotics
Gripper • Mechanical gripper ประกอบด้วยนิ้ว 2 หรือมากกว่า ซึ่ง controller ของ robot จะควบคุมให้ open and close เพื่อจับ workpart Industrial Robotics
Gripper • Vacuum gripper เป็นตัวจับโหลดสุญญากาศโดยอาศัยการดูดใช้สำหรับจับวัตถุผิดเรียบ • Magnetized device อุปกรณ์ที่ถูกทำให้เป็นแม่เหล็กที่ใช้สำหรับหยิบวัตถุประเภทเหล็ก • Mechanical gripper มีการเทคโนโลยีขั้นสูงในการใช้งาน ดังนี้ • Dual gripper ประกอบด้วย 2 gripper ใน 1 end effectors ใช้เป็นเครื่องมือ loading and unloading Industrial Robotics
Gripper • Interchangeable fingers สามารถใช้ gripper ที่ทำงานทางกล 1 gripper เพื่อหยิบ part ที่แตกต่างกัน • Sensory feedback นิ้วของ gripper สามารถทำงานเช่น • Sensing ว่ามี workpart อยู่หรือไม่ • จำกัดขนาดของแรงที่ใช้งานได้ (part ที่แตกหักได้ง่าย) • Multiple fingered gripper ลักษณะกายวิภาคทั่วไปเหมือนแขนมนุษย์ • Standard gripper product มีความหลาหลาย สำหรับแต่ละ robot ใช้งานต่างกัน Industrial Robotics
Tool • ใช้กับงานที่ robot ต้องดำเนินการ processing กับ workpart • Robot อาจต้องหยุดนิ่งหรือเคลื่อนที่อย่างช้าๆ (เช่น ประกอบชิ้นส่วนย่อย) • ตัวอย่างของ tools ที่ใช้เป็น end effector คือ • Spot welding gun • Arc welding tool • Spray painting gun • Rotating spindle for drilling, routing, grinding • assemblytool • Heating torch • Water jet cutting tool Industrial Robotics
Sensors in robotics • แบ่งออกได้เป็น 2 ประเภทคือ • Internal ใช้ควบคุมตำแหน่งและความเร็วของ joint ต่างๆ • External ใช้ในการประสานงาน robot ให้เข้ากับอุปกรณ์อื่นๆ ที่อยู่ภายใน cell ตัวอย่างของ sensor ที่ใช้งานลักษณะนี้ • Tactile sensors ใช้เพื่อตรวจจับว่าหน้าสัมผัสระหว่าง sensor กับวัตถุอื่นอยู่ติดกันหรือไม่ • Proximity sensor เป็น sensor ที่ใช้สำหรับบ่งชี้ว่ามีวัตถุอยู่ใกล้ sensor หรือไม่ Industrial Robotics
Sensors in robotics • Optical sensor ชนิดที่เป็น photocells นำมาตรวจจับว่าขณะนี้มีวัตถุอยู่หรือไม่ • Machine vision ใช้ในงานเกี่ยวกับการตรวจสอบอัตโนมัติ เช่น ตรวจสอบความบกพร่องของชิ้นงาน บ่งชี้ชิ้นงาน หรือ นำทาง • Other sensor ใช้งานด้านอื่นๆ เกี่ยวกับ robot เช่น measuring temperature, fluid pressure, fluid flow, electrical voltage, current และคุณสมบัติอื่นๆ ทางกายภาพ Industrial Robotics
Industrial robot application • เริ่มต้นครั้งแรกในปี ค.ศ.1961 ซึ่ง robot ใช้ในการ load and unload ชิ้นงานที่ทำการหล่อ เพราะสิ่งแวดล้อมการทำงานไม่เหมาะกับมนุษย์ • การใช้งาน robot ทดแทนมนุษย์ใช้ในงานต่อไปนี้ • Hazardous work environment for human ลักษณะงานไม่ปลอดภัย ส่งผลร้ายต่อสุขภาพ เช่น Forging, spray painting, continuous arc welding and spot welding • Repetitive work cycle ลำดับการทำงานใน work cycle มีลักษณะที่เหมือนกันและมีการเคลื่อนที่แบบง่ายๆ Industrial Robotics
Industrial robot application • Different handling for human งานที่เกี่ยวกับการขนย้ายชิ้นงานหรือเครื่องมือที่มีน้ำหนักมาก หรือยากแก่การขนย้าย • Multishift operation สามารถทำงานได้คงเส้นคงวามากกว่ามนุษย์ในการทำงานกะดึก • Infrequent operation เมื่อเป็นกระบวนการผลิตแบบ batch or job shop ซึ่งต้องการการติดตั้งเครื่องจักรใหม่ก่อนที่จะผลิตชิ้นงานต่อไป • Part position and orientation are established in the work cell Industrial Robotics
Material handling application • Robot ทำหน้าที่เคลื่อนย้ายวัสดุหรือชิ้นส่วนจากที่หนึ่งไปยังอีกที่หนึ่ง โดยใช้ gripper เป็น end effector • ต้องออกแบบให้เหมาะสมกับ part ที่มีลักษณะเฉพาะแตกต่างกัน • การใช้งานในส่วนนี้เป็นได้ 2 กรณี • Material transfer • Machine loading and/or unloading Industrial Robotics
Material handling application • Material transfer • หมายถึง pick-and-place operation ต้องการ robot ที่มีลักษณะ low-technology • มี joint 2,3 หรือ 4 เท่านั้น • ส่วนมากจะเป็น robot ที่ขับเคลื่อนด้วย pneumatic • ซับซ้อนมากขึ้น คือ การขนย้ายวัสดุ เป็นแบบ palletizing หรือ depalletizing Industrial Robotics
Material handling application • Machine loading and/or unloading มีอยู่ 3 กรณีที่เป็นไปได้ • (1) machine loading, • (2) machine unloading • (3) machine loading and unloading • ใช้ในกระบวนการผลิตต่อไปนี้ die casting, plastic molding, metal machining operation, forging, pressworking และ heat treating Industrial Robotics
Processing operations • หมายถึง การนำ robot ไปทำงานต่างๆ ที่ก่อให้เกิดการทำงานบนชิ้นงาน • บาง processing อาจมีการใช้งาน tool มากกว่า 1 ในระหว่าง work cycle • ตัวอย่าง robot ที่ใช้งานเกี่ยวกับกระบวนการต่างๆ คือ spot welding, continuous are welding and spray coating และการใช้งานอื่นๆ Industrial Robotics
Robot programming • หมายถึง การกำหนดเส้นทางในอากาศให้ robot ต้องเดินตาม รวมทั้ง peripheral actions เพื่อให้เกิดการทำงานทั้ง work cycle • peripheral actions ได้แก่ opening and closing the gripper, การตัดสินใจในขั้นตอนต่างๆ และการสื่อสารกับอุปกรณ์อื่นๆ ภายใน cell • Robot จะถูกป้อนด้วยคำสั่งที่อยู่ในรูปของ program เข้าไปยัง controller memory Industrial Robotics
Robot programming • Programming method • Leadthrough programming • Computer-like robot programming languages • Off-line programming Industrial Robotics
Leadthrough programming • เป็นการสอนนำโปรแกรม และการใช้โปรแกรมของ robot จากการควบคุมของหน่วยความจำ • โดยวิธีการนี้ คือ ภาระงาน และการเคลื่อนที่ต่างๆ จะถูกสอนไปที่ robot โดยวิธีแสดงให้ดู ผ่านการเคลื่อนที่ในแต่ละ cycle • โดยการกดปุ่มเพื่อให้ robot arm ไปยังตำแหน่งที่กำหนดในลำดับ และบันทึกตำแหน่งเข้าไปในหน่วยความจำ Industrial Robotics
Leadthrough programming • ใช้วิธีการควบคุมแบบ point-to-point ซึ่งใช้งานกับ teach pendent (hand-held control box) Industrial Robotics
Computer-like robot programming languages • เป็นวิธีการโปรแกรม robot โดยใช้ computer ในการควบคุมการทำงานต่างๆ ของ robot • เหตุที่เรียกว่า on-line/off-line เพราะ robot จะต้องถูกสอนให้รู้จักกับ ตำแหน่งต่างๆ ผ่านวิธี leadthrough method • เหมาะกับงานที่ซับซ้อนและงานที่ต้องมีการตัดสินใจ ซึ่งวิธีการ leadthrough method ไม่สามารถทำได้ Industrial Robotics
Computer-like robot programming languages • วิธีการนี้สามารถทำงานได้ต่อไปนี้ได้ คือ • เพิ่มการใช้งาน sensor รวมทั้งสัญญาณแบบ analog /digital input และ output • ปรับปรุงในเรื่อง output เพื่อไปควบคุมการทำงานของอุปกรณ์อื่นๆ ภายนอกตัว robot • Program logic ที่มีความซับซ้อนและ leadthrough method ไม่สามารถทำได้ • มีการคำนวณต่างๆ และข้อมูลของ กระบวนการ คล้ายกับ computer programming languanges • สื่อสารกับระบบ computer อื่นๆ ได้ Industrial Robotics