Download

1 / 27
360 likes | 686 Views
NASA A LTAIR Lunar Lander Project Avionics System Architecture Study Minimum Functional Architecture (Subsystems & Components) 09 April 2008. ALTAIR Avionics System Definition. Generic Avionics System Definition: The integrated group of all Lunar Lander Vehicle

E N D
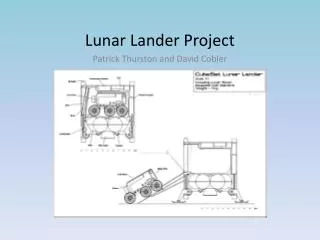
NASA ALTAIR Lunar Lander Project Avionics System Architecture Study Minimum Functional Architecture (Subsystems & Components) 09 April 2008
ALTAIR Avionics System Definition Generic Avionics System Definition: The integrated group of all Lunar Lander Vehicle flight electrical, electronic, and electro-mechanical components, flight wiring harnesses connected to those components, and flight software loaded into those components. • Major Avionics Subsystems: • Command & Data Handling (C&DH) • Communications & Tracking (C&T) • Electrical Power Avionics • Guidance Nav & Control (GN&C) Avionics • Crew I/F, Controls, Displays & A/V • Flight Software (FSW) • Minor Avionics Subsystems: • Thermal Control & Monitoring Avionics • Mechanism Control & Monitoring • Reaction Control System Avionics • Cryogenic Control & Monitoring Avionics • Thrust Vector Control & Monitoring Avionics • Descent Main Engine Control & Monitoring • Ascent Main Engine Control & Monitoring • Life Support System Control & Monitoring
Design Package Partitioning and Scope
Avionics System Levels 1&2 Design Drawing & Component Description
Level-2 Avionics Architecture Key Item Creation of the Common Services Assembly (CSA): • All of the Common Avionics Functions that are required for all 3 Design Reference Missions (DRMs) were identified and grouped together in a new Level-2 Configuration Item called the “Common Services Assembly” (CSA). Rationale/Benefits: • Centralization/Consolidation of Common Items: The CSAs eliminate any DRM-Unique implementations of common functions, and any unnecessary duplication of functions/implementations in different modules within a particular DRM, thereby minimizing the avionics system size, mass, power, and cost. • Economies of Scale: The CSAs can be “mass-produced” for use in every mission (9), regardless of the particular DRM, resulting in major cost savings, significant schedule reduction, common verification & test, and operational simplification. Even greater benefits can be achieved if the CSA is also used for other Lunar Surface Systems. CSA Top-Level Physical Packaging Configuration: • Each DRM Type may have a unique CSA top-level packaging configuration and harness, however, their CSA Hardware Components will be identical. • The CSAs may have to be split into separate physical entities, such as a CSA Electronic Box Bay and a CSA Sensor/Antenna Ring.
Ascent Module CSA Avionics Platform Placement Options Airlock +X Orion “Keep Out” zone +Y 2,4 2,4 2,4 3 3 3 3 3 3 +Y 4 4 4 4 +Z Sortie Cargo Size Unknown 6.22 m 1 1
Level 3 Avionics System Data Processing and Data Architecture Description
Avionics – Data Processing & Data Architecture Description • Driven by requirement of minimum mass and power and high reliability of maintaining vehicle control and crew safety • Composed of two Architectural Elements optimized to perform: • Vehicle Flight Control • Centralized General Purpose Processor • Distributed vehicle control effectors and sensors • Crew Controls and Displays • Interconnected by “low speed” highly deterministic data network • Communications and Data Management • RF Communications units • Video imaging and processing units • Data Routers • Interconnected by “high speed” data network and C3I protocols
Vehicle Control Element -Central Processing • Central Processor Performs • Vehicle level closed loop control processing • Vehicle monitoring & configuration mgmt processing • Redundancy management processing • User Display and Controls (C&D) processing (Flt Crew and Ground) • Subsystems processing suited for “general purpose processors” • Central Processor Precepts and Attributes • “Low/Medium” performance general purpose processor • Focused on high reliability, low power “bullet proof” proven hardware • High performance special purpose processing needs are offloaded to sensors, effectors, and special processors where necessary • Allows a low speed, highly reliable and low power vehicle control network solution
Vehicle Control Element -Sensor and Effectors • Sensor and control effectors interface with central processor via two methods depending on complexity/functionality of the unit • “Electronic and processing intense” Units (“Type A”) • Units interface directly with the low speed - Vehicle Control Data Network (VCDN) • Processing intense sensor and effector units also contain special purpose processors (SW and/or Firmware) for pre-processing and data formatting • Offloads the central processor and reduces network traffic required • Units consist of: • IMU - Descent Main Engine (DME) Controller • Star Tracker - S-Band SDR*, Router*, & CIU • Lidar* - D&C Controller* • Landing Radar - PDU • Hazard Detection Sensor* - RPC • Video Processor (VPU)* - Fuel Cell Electronics • EVA Servicing Unit and Battery Charger • *Note: Units also have port to High Rate Data Network (HRDN) for video and C&T data
Vehicle Control Element -Sensors and Effectors (cont’d) • “Small, Highly Distributed” Sensors and Effectors (Type “B”) • “Type B” are of the category of distributed and remote temperature sensors, pressure sensors, position indicators, discrete commands of valve actuation, S&M deploy, and analog drive commands which are of standard type discrete and analogs. • And, which do not naturally contain sufficient electronic sophistication to interface directly with the vehicle control data network (VCDN) • “Type B” sensors and effectors interface with central processor via a general purpose data collector/distributor unit dubbed RMUX (remote multiplexer/de-multiplexer) • Contains a general purpose microcontroller for local processing and control • Atleast 1 in each module and can have significant commonality • Provides central process interface for subsystems control and Monitoring: • TCS • Life Support • RCS Prop Storage • Cryo Prop Storage • Pyro Events Control (PEC) • Ascent Main Engine Control • RCS Engine Control • Mechanisms Control • Thrust Vector Control (TVC)
Crew and Ground User Command & Control (C&C) Interface • Crew C&C Interface provided by Displays and Controls (D&C) Controller interfacing directly with the Vehicle Control Data Network (VCDN). Hardware consists of: • D&C Controller – Provides local display formatting, display drive and D&C data routing with Central Processor. High Rate Data Network (HRDN) I/F for video data. • Flat Screen text and graphic Displays with “Edge Panel Switches” • Keyboards • Vehicle Flight Control Hand Controls – With Rotational, Translational, and Throttle Control functionality • Caution & Warning Indicators and control Panel • CEV Flight Crew C&C provided by hard-line interface using D&C equivalent commands and display feedbacks to CEV (also used by preflight checkout users) • CTN ground access users provided C&C interface via RF communications links using D&C equivalent commanding and/or special applications implement command codes.
Communication and Data Management Element • Communication and Data Management Element Provides function of: • RF Communications between Lander, CTN, CEV and Surface Sys • Data formatting and encoding • High Speed Data Routing • Video imaging and processing • Hardware Consists of: • RF Communications units • Video Cameras (landing and Rndz/docking) • Interfaces with LIDAR and Hazard Detection Sensor for any video type image data provided • Video processing units (VPU) • D&C “Flat screen” display interfaces for Video • Interconnected by “high rate” data network and C3I protocols • C3I Data Routers • Interfaces to all external CxP Systems • Provides communication security to Vehicle Control Data Network (VCDN) and Altair • Interface to crew portable networked equipment • Partitions critical function protocols
Avionics System Level-3 Design Drawing & Data Network Description
Avionics System Subsystem Specific Design Drivers
Electrical Power Subsystem & Components • Accommodate All External Power Sources: • Ares-V Launch Tower via Umbilical Cable and EDS • Earth Departure Stage • Crew Exploration Vehicle • Lunar Outpost • Accommodate LLV Power Sys - Internal Power Generation B/L Approach: • Fuel Cells & Assoc Electronics located in Descent Module • Accommodate LLV Power Sys - Internal Power Storage B/L Approach: • Batteries located in Ascent Module • Power Switching & Distribution • Simple Power Distribution Bus between Modules (sometimes bi-directional) • Each Module contains a Power Unit (RPC or PDU) with a Primary Power Bus Input, Power Distribution Outputs to all required components within that module, and a Vehicle Control Data Network (VCDN) I/F that controls the power switching/distribution within that module. • Support an EDS or insitu Flight Crew initiated startup with an “always-active” power source for "cold start" of Altair - Nominal mission and contingencies. • Power Component Modularity & Commonality • RPC and PSDU components in different modules can have significant commonality • Avionic Component Power Supply Cards may be able to use common designs.
Communication & Tracking (C&T) Subsystem & Components • Software Defined Radio (SDR) and supporting antennas and electronics • Configurable for S-Band, 802.xx, EVA • Interfaces to both data networks (VCDN & HSDN) • Encoding/decoding (LDPC,etc..) • One radio needed for each concurrent link • Video Processing Unit (VPU) • ALHAT,LIDAR, & GN&C (Landing\Docking) Video data processing • Accepts raw or encoded streams • Limited to 2 video streams in each mission phase • Processes and distributes camera commands • CIU & Speaker Mic • Provides voice communications for astronauts • Located in Ascent Module and Air Lock • EVA Checkout Antenna • Located in Air Lock for Sortie and Ascent Module for Crew Checkout for EVA
Guidance, Navigation, & Control (GN&C) Subsystem & Components • All GN&C sensors assumed to be Type A “SMART” boxes with direct interface to the Vehicle Control Data Network (VCDN). • Star Tracker – Inertial attitudes • Inertial Measurement Unit (IMU) – Rates and Acceleration • LIDAR • Provides range & relative orientation to support docking • Sensor is critical for auto docking • Landing Radar – Altitude and altitude rate, multiple beams • Hazard Detection Sensor • Currently not known exactly what functionality will be included • Using as a placeholder to provide “HOOKS” for inclusion into design • Interfaces directly to the Vehicle Control Data Network (VCDN) for processed data, and to the High Rate Data Network (HRDN) for video processing • Study includes looking at sharing of Altair resources such as cameras and IMU’s • Where possible sharing of Altair resources such as cameras and IMU’s is recommended
Propulsion Subsystem & Components • Descent Main Engine Controller (DME) • Controller performs critical function of safe pre-start, start, throttling, monitoring and shutdown of Descent Engine. • Requires critical time sequencing and monitoring performed at 50 HZ • Based on meeting with Kendall Brown while at LaRC • High rates and precision sequencing requirement led to concluding a DME local Controller would be necessary. • Interfaces directly with Flight Computer over Vehicle Control Data Network (VCDN). • Closed-loop control of engine to be performed locally within DME Controller based on high level commands from Central Processor.