Download
1 / 16
170 likes | 375 Views
Software Testing for Intelligent Robots. Justin Peckner Maria Velasquez November 13, 2012. Paper Reviewed. Yun Koo Chung and Sun-Myung Hwang. "Software Testing for Intelligent Robots", International Conference on Control, Automation, and Systems, Seoul, 2007.

E N D
Software Testing for Intelligent Robots Justin Peckner Maria Velasquez November 13, 2012
Paper Reviewed • Yun Koo Chung and Sun-Myung Hwang. "Software Testing for Intelligent Robots", International Conference on Control, Automation, and Systems, Seoul, 2007. • Relevance: shows how software testing can be adapted to a particular software type, using ISO standards.
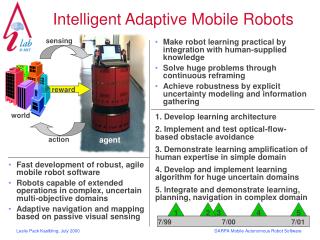
Introduction • Robots are becoming increasingly used in businesses and homes. • Software components such as voice recognition, facial recognition, movement control, and more, each need thorough testing. • Paper describes researchers' spearheading of an initiative for testing robotics software using ISO standards.
Background • Ubiquitous Robot Companion (URC): Korean project aimed at developing server/client based robots • "Robots will offer news, weather, recipes, [and] will clean homes" * • Robots maintain connection to a server • As much processing of robot functions as possible is done server-side • Results in less expensive robots * http://robotgossip.blogspot.com/2006/06/korea-picks-ubiquitous-robot-companion.html
Applying ISO Standards • The testing process is based on ISO 9126 and ISO 14598-5. • 9126 specifies attributes to strive for. • The researchers took the 30 most important specifications from this standard (trimmed down from about 80). • 14598-5 specifies how to test these attributes.
ISO/IEC 9126: Quality Attributes ISO/IEC 9126 consists of six standards: • Functionality: how capable is the software of carrying out its specified requirements? • Submetrics: Suitability, Accuracy, Interoperability, Security, Functional Compliance
ISO/IEC 9126: Quality Attributes • Reliability: how well does the software maintain its specified performance, when used under normal conditions? • Submetrics: Maturity, Fault Tolerance, Recoverability, Reliability Compliance • Usability: how easy is it for users to understand and use the software? • Submetrics: Understandability, Learnability, Operatability, Attractiveness, Usability Compliance
ISO/IEC 9126: Quality Attributes • Efficiency: how well does the software manage performance of the robot? • Submetrics: Time Behavior, Resource Behavior, Efficiency Compliance • Maintainability: how much effort is required to change the code over time? • Submetrics: Analyzability, Changability, Stability, Testability, Compliance
ISO/IEC 9126: Quality Attributes • Portability: how ready is the software to be transferred to a different environment? • Submetrics: Adaptability, Co-Existance, Replacibility, Compliance
ISO 14598-5: Testing the Attributes • Analysis of requirements: what are specific features that customers want? • Evaluation specification: for each requirement in step #1, how will we measure it? Analysis of evaluation requirements Design and definition of evaluation plan Evaluation specification Evaluation report Execution of evaluation plan
ISO 14598-5: Testing the Attributes 3. Design/definition of evaluation plan: create a specific, repeatable testing plan. 4. Execution of plan. 5. Evaluation report. Analysis of evaluation requirements Design and definition of evaluation plan Evaluation specification Evaluation report Execution of evaluation plan
Robot Software Components Human_Robot Interactions (HRI) Smart Action Technology Others... Visual recognition of user faces/gestures Environmental mapping Audible recognition of user voice Physical object manipulation
Test Case Scenarios • In developing test cases, the authors specify that each case should: • reduce the number of additional cases needed by more than one. Unclear about how exactly to do this. • detect as many errors as possible (even if finding them is not the specific goal of the test case). Some people might find this approach too broad.
Creating Test Cases • Identify the requirements in the specification. [ISO14598-5, step #1] • Examples: The robot shall... • ...map its surroundings using a supersonic sensor. • ...recognize the faces of humans it has already been programmed to know at least 95% of the time. • ...distinguish between the voices of humans it has already been programmed to know.
Creating Test Cases 2. Create a test scenario targeting at least one requirement (more if possible). [ISO14598-5, step #2] 3. Continue this until all requirements have been covered. 4. Create a specific, repeatable test plan for the scenario. [ISO14598-5, step #3]
Conclusion • The paper focuses on presenting an approach to URC Robot Software Components testing, by adapting both ISO 9126 and 14598. • Beginning of an initiative to establish a standard in robot software testing. • Good demonstration of applying abstract standards to a practical project.