Adaptive Intelligent Mobile Robots
270 likes | 449 Views
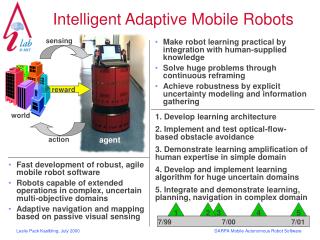
Adaptive Intelligent Mobile Robots. Leslie Pack Kaelbling Artificial Intelligence Laboratory MIT. Two projects. Making reinforcement learning work on real robots Solving huge problems dynamic problem reformulation explicit uncertainty management. Reinforcement learning.

Adaptive Intelligent Mobile Robots
E N D
Presentation Transcript
Adaptive Intelligent Mobile Robots Leslie Pack Kaelbling Artificial Intelligence Laboratory MIT
Two projects • Making reinforcement learning work on real robots • Solving huge problems • dynamic problem reformulation • explicit uncertainty management
Reinforcement learning • given a connection to the environment • find a behavior that maximizes long-run reinforcement Environment Observation Reinf Action
Why reinforcement learning? • Unknown or changing environments • Easier for human to provide reinforcement function than whole behavior
Q-Learning • Learn to choose actions because of their long-term consequences • Given experience: • Given a state s , take the action a that maximizes
Does it Work? • Yes and no. • Successes in simulated domains: backgammon, elevator scheduling • Successes in manufacturing and juggling with strong constraints • No strong successes in more general online robotic learning
Why is RL on robots hard? • Need fast, robust supervised learning • Continuous input and action spaces • Q-learning slow to propagate values • Need strong exploration bias
Making RL on robots easier • Need fast, robust supervised learning • locally weighted regression • Continuous input and action spaces • search and caching of optimal action • Q-learning slow to propagate values • model-based acceleration • Need strong exploration bias • start with human-supplied policy
Start with human-provided policy action Human Policy Environment state
Do supervised policy learning Human Policy action Train Policy s a Environment state
When the policy is learned, let it drive Human Policy Train action Policy Environment state
Q-Learning Train action Policy RL s Q-Value v a D Environment state
Acting based on Q values s Q-Value max index a1 Q-Value a2 a Q-Value an
s Q-Value v a Letting the Q-learner drive Train Policy action RL max D Environment state
s Q-Value v a Train policy with max Q values Train action Policy RL max s’ D Environment state
Add model learning Train action Policy RL s Q-Value v a Train s s Model a r D Environment state
When model is good, train Q with it Train action Policy RL s Q-Value v a Train s’ Model a’ D Environment state
Other forms of human knowledge • hard safety constraints on action choices • partial models or constraints on models • value estimates or value orderings on states
We will have succeeded if • It takes less human effort and total development time to • provide prior knowledge • run and tune the learning algorithm • than to • write and debug the program without learning
Test domain • Indoor mobile-robot navigation and delivery tasks • quick adaptation to new buildings • quick adaptation to sensor change or failure • quick incorporation of human information
Solving huge problems • We have lots of good techniques for small-to-medium sized problems • reinforcement learning • probabilistic planning • Bayesian inference • Rather than scale them to tackle huge problems directly, formulate right-sized problems on the fly
Dynamic problem reformulation working memory perception action
Reformulation strategy • Dynamically swap variables in and out of working memory • constant sized problem always tractable • adapt to changing situations, goals, etc • Given more time pressure, decrease problem size • Given less time pressure, increase problem size
Multiple-resolution plans Fine view of near-term high-probability events Coarse view of distant low-probability events
Information gathering • Explicit models of the robot’s uncertainty allow information gathering actions • drive to top of hill for better view • open a door to see what’s inside • ask a human for guidance Two miles up this road Where is the supply depot?
Explicit uncertainty modeling • POMDP work gives us theoretical understanding • Derive practical solutions from • learning explicit memorization policies • approximating optimal control
Huge-domain experiments • Simulation of very complex task environment • large number of buildings and other geographical structures • concurrent, competing tasks such as • surveillance • supply delivery • self-preservation • other agents from whom information can be gathered