Download
1 / 26
280 likes | 444 Views
Information from a Numerical Weather Model for Improving Atmosphere Delay Estimation in Geodesy. Arthur Niell MIT Haystack Observatory Leonid Petrov NVI/GSFC. Mapping Function. τ Z. τ ( ε ). m ( ε ) = τ ( ε )/ τ Z. Background. Very Long Baseline Interferometry (VLBI) Preceded GPS

E N D
Information from a Numerical Weather Model for Improving Atmosphere Delay Estimation in Geodesy Arthur Niell MIT Haystack Observatory Leonid Petrov NVI/GSFC GPS Meteorology Workshop
Mapping Function τZ τ(ε) m(ε) = τ(ε)/ τZ GPS Meteorology Workshop
Background • Very Long Baseline Interferometry (VLBI) • Preceded GPS • Atmosphere modeling serious limitation • No orbit, multipath, antenna modeling problems below 10 degrees elevation • Use all data down to 3 degrees • Used to evaluate NWM as input for atmosphere model GPS Meteorology Workshop
Outline • What is a mapping function? • How can it be parameterized to reflect the real atmosphere? • A new isotropic mapping function • A different way to model the asymmetric parts of the atmosphere • Are the results any better? GPS Meteorology Workshop
Summary • Use of NWM improves mapping functions significantly. • Hydrostatic mapping function error is more important than wet for repeatability except in the tropics. • Wet mapping function is more important than hydrostatic for seasonal variation. • A priori hydrostatic gradient allows more accurate wet gradient estimation. GPS Meteorology Workshop
Why is the troposphere such a problem for geodesy? Delay observable for ith satellite: where g = geometric delay (antenna position, orbits, Earth parameters) C = clock errors (receiver, satellite) a = atmosphere delay = elevation angle of observation GPS Meteorology Workshop
Troposphere Delay Model , = elevation,azimuth P = surface pressure hZ = zenith hydrostatic delay (~2 m) wZ = zenith wet delay (~20 cm) LN = north gradient delay (total) LE = east gradient delay (total) mh, mw, mg = mapping functions GPS Meteorology Workshop
Analytic mapping function • Determine coefficients a, b, c in terms of atmospheric parameters • e.g. ah,bh,ch as a function of latitude and the geopotential height of the 200 hPa level GPS Meteorology Workshop
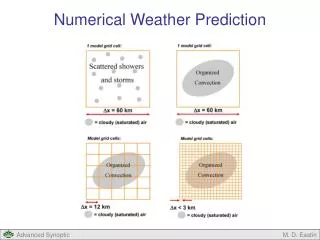
Numerical Weather Model • Provides global distribution of information • Data every six hours • Grid spacing 2.5° (NCEP) • Geopotential height, specific humidity, temperature GPS Meteorology Workshop
Numerical Weather Model • Hydrostatic mapping function parameter • z200 = geopotential height of 200 hPa surface • Physical significance • z200 represents thickness of the troposphere • corresponds to a height near the tropopause • a priorihydrostatic gradient given by (azimuth, zenith angle) of normal to z200 GPS Meteorology Workshop
Hydrostatic Gradient gradient ~0.02° 200 hPa surface ~10.05 km ~10 km ~9.95 km ~200 km GPS Meteorology Workshop
Numerical Weather Model • Wet mapping function parameter ~mw(3°) GPS Meteorology Workshop
Troposphere Delay Model using IMF ´, = tiltedelevation,azimuth P = surface pressure hZ = zenith hydrostatic delay (~2 m) wZ = zenith wet delay (~20 cm) LNW = north gradient delay (wet) LEW = east gradient delay (wet) mh, mw, mgW = mapping functions GPS Meteorology Workshop
IMF Implementation • Obtain NCEP analysis after 6-hour update • geopotential height • temperature • specific humidity • Write out two files on same grid spacing (2.5°) • geopotential height of 200 hPa surface • value of smfw3 calculated at each grid point • Interpolate in time and latitude/longitude • Calculate a, b, and c for hydro and wet • Calculate mh( ´) and mW() GPS Meteorology Workshop
Comparison with radiosonde-derived mapping functions GPS Meteorology Workshop
Height Error (5° min. elevation) GPS Meteorology Workshop
Height Uncertainty(mid-latitude) GPS Meteorology Workshop
Evaluation usingVLBI data GPS Meteorology Workshop
Baseline Length Repeatability (CONT94) GPS Meteorology Workshop
Repeatability Improvement with IMFg (CONT94) GPS Meteorology Workshop
Repeatability Improvement with IMFg (1993-2002) GPS Meteorology Workshop
Wet Gradient with/withoutapriori Hydrostatic Gradient WVR wtd avg GPS Meteorology Workshop
Annual Baseline Length(Westford-Wettzell) GPS Meteorology Workshop
Annual Baseline Length(Kashima-Gilcreek) GPS Meteorology Workshop
Summary • Use of NWM improves mapping functions significantly. • Hydrostatic mapping function error is more important than wet for repeatability except in the tropics. • Wet mapping function is more important than hydrostatic for seasonal variation. • A priori hydrostatic gradient allows more accurate wet gradient estimation. GPS Meteorology Workshop
IMF or YAMF? IsobaricMapping Function or Yet Another Mapping Function Thank you for your attention. GPS Meteorology Workshop