Exploring Time vs. State Discretization in Discrete Event Dynamic Systems for Industrial Applications
140 likes | 291 Views
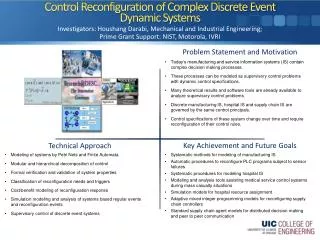
This research examines the critical aspects of discretization in Discrete Event Dynamic Systems (DEDS), focusing on time versus state discretization. We present case studies in industrial supervisory control systems, highlighting the mapping of continuous plants into automata. A notable example involves the pendulum model, showcasing the implications of dimensionality explosion. Additionally, we discuss control strategies for process execution, fault detection, and event-driven communication within controlled environments, providing insights on practical applications in industrial settings.

Exploring Time vs. State Discretization in Discrete Event Dynamic Systems for Industrial Applications
E N D
Presentation Transcript
Discrete-Event Dynamic Systems Research • Systems being studied • Time discretisation vs state discretisation • Industrial interest • Supervisory control – one reason to do research • Chosen philosophy • Mapping continuous plants into automata • A brief example: Pendulum • Dimensional explosion • Status
DMUX DMUX Systems being studied
state variable time Time vs State Discretisation Sampled signal Discrete-event signal state variable Definition State Event : A state variable just crossed a state boundary time
Industrial interest • Supervisory control • Recipe execution and control • Start-up • Shut-down (normal and emergency) • Fault analysis • detection • isolation
continuous discrete ControlledPlant Discrete-event-dynamic plant Supervision of Controlled Plant Supervisor Environment EventDetection
Supervisory control – a justification for research Example PLC project : industrial dairy product plant Task man months % Specs 12.0 26 Coding data 5.6 12 Coding logic 16.8 37 Bench testing 5.6 12 Commissioning 6.0 13 after 18 months code out of date
Philosophy of approach • think in terms of state space – • discretise state, x, and input, u, (output, y, follows trivially). • if dim(x) = dim(y) no problem – take either x or y, after appropriate transformation, as state. • if state observable – usually no problem as this type of control operates on the long time scale at which one can assume the observer to be instantaneous. • Result: Non-deterministic automaton • Note: Several transitions may be possible being in a discrete state and applying a discrete input. level model does not know what the current trajectory is temperature
Modelling approach • Definition of event : Trajectory crosses in one of the state dimensions a defined boundary • note: only one boundary at the time can be crossed. Simultaneous crossings are not possible.Argument: use of serial line for the communications of the events or use of a serially operating computing device.
Modelling 2 • Transition can be computed by analysing boundary only.Proved also for non-analytical functions f(x,u) as long as continuity is given. Consequence: no integration necessary • Component equilibrium hypersurfaces • Assumptions • linear hypersurfaces • nonlinear hypersurfaces • monotone hypersurfaces • non-monotone hypersurfaces • Characteristic • Component-equilibrium hypersurface often passes through corner of hypercube
Pendulum in the Box position in one co- ordinate is only detected when a light beam is interrupted
1 1,3 2,3 3,3 0.8 0.6 2,2 0.4 0.2 3,2 1,2 x2 0 -0.2 -0.4 -0.6 1,1 2,1 3,1 -0.8 -1 -1 -0.5 0 0.5 1 x1 Pendulum phase behaviour d/dt x1 = 0 d/dt x2 = 0
Pendulum automaton 1 0.5 1,3 2,3 3,3 x2 -0.5 2,2 -1 3,2 1,2 -1 -0.5 0 0.5 1 x1 1,1 2,1 3,1
Dimensionality explosion • One of the commonly used arguments • Claim: is not a problem because • analysis and thus mapping is done component by component • only those states and inputs must be analysed that are present in the right-hand side of the differential equation for each component only • the latter coupling is usually week, as equipment further away is not directly affecting the state being analysed. It is only the equipment-internal state and the coupled pieces’ state that may affect the state being analysed.
Status • Theory, algorithms and software for mapping continuous models that are observed with event detectors. • process may be nonlinear • monotone component-equilibrium surfaces are an advantage • linear is extremely simple • state-explosion does essentially not exist • Conditions and algorithm to reconstruct continuous trajectory given a set of events. • Some results on control, based on a reachability analyses using control invariant sets and forced transitions between such sets. • Min and max time for the transitions can be computed for those parts of the flow field that is monotone, thus for monotone systems completely. • Results for the construction of automata, that is how to select the boundaries as to be able to detect not directly observed faults.