Download
1 / 1
10 likes | 88 Views
This study assesses the accuracy of a Magellan 315 handheld GPS unit by collecting and analyzing planar coordinates of a stationary object in Blacksburg, Virginia. The research compares morning and night readings to evaluate deviations from a True value, highlighting the variability of GPS readings depending on the time of day. The findings indicate that while GPS units have limitations in accuracy, no significant trend was observed. The study sheds light on the sources of error in GPS measurements, offering insights for improving accuracy in GPS navigation.

E N D
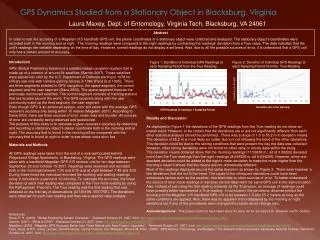
GPS Dynamics Studied from a Stationary Object in Blacksburg, Virginia Laura Maxey, Dept. of Entomology, Virginia Tech, Blacksburg, VA 24061 Abstract In order to test the accuracy of a Magellan 315 handheld GPS unit, the planar coordinates of a stationary object were collected and analyzed. The stationary object’s coordinates were recorded both in the morning and at night. The morning readings were compared to the night readings by contrasting the readings’ deviation from a True value. The data indicates that the unit’s readings are variable depending on the time of day. However, overall readings do not display a set trend. Also, due to all the possible sources of error, it is understood that a GPS unit only has a certain amount of accuracy. Introduction GPS (Global Positioning System) is a satellite-based navigation system that is made up of a network of around 24 satellites (Garmin 2007). These satellites were placed into orbit by the U.S. Department of Defense starting in 1978 for military use only with civilians gaining access in 1983 (Pace et al 1995). There are three segments entailed in GPS navigation: the space segment, the control segment and the user segment (Dana 2000). The space segment involves the previously mentioned satellites. The control segment consists of tracking stations that are located around the world. The GPS receivers along with the user community make up the third segment, the user segment. Even though GPS is an advanced system, error still exists with the average GPS receiver’s accuracy only being within 15 meters (Magellan 2001). According to Dana 2000, there are three sources of error: noise, bias and blunder. All sources of error are constantly being observed and questioned. The purpose of this study is to calculate a given receiver’s accuracy by observing and recording a stationary object’s planar coordinate both in the morning and at night. The accuracy that is found in the morning will be compared with the accuracy that is found at night in order to see where more error lies. Figure 1: Deviation of Individual GPS Readings at each Sampling Period from the True Reading Figure 2: Deviation of Individual GPS Readings at each Sampling Period from the True Reading Deviation (m) at night Deviation (m) in the morning GPS Readings (6 readings= 1 Sampling Period) Results and Discussion As displayed in Figure 1 the deviations of the GPS readings from the True reading do not show an overall trend. However, to be certain that the deviations are or are not significantly different from each other statistical analysis should be performed. There was a range of 1.0 to 55.2 m in deviation means. The deviation of 55.2 m is most likely an outlier due to it not following the trend of the other deviations. This deviation could be due to the raining conditions that were present the day the data was collected however, other strong deviations were not found on other rainy or cloudy days within the study. The deviation means obtained show that the morning readings (11.53839 m , sd of 0.09203) deviated more from the True readings than the night readings (8.046526 m, sd 5.644209). However, since one standard deviation could be added to the night’s mean deviation to make the mean higher than the morning’s mean it shows that the means are not dramatically different. Most of the readings displayed around the same deviation as shown by Figure 2. There were however a few deviations that did not fit the trend. The cause of the infrequent deviations could have been extraneous factors such as the weather, tree branches or other sources of error. To better understand the source of error more readings or samples can be taken with the same GPS unit in the same location. Also, instead of just using the first reading obtained as the True value, an average of readings could have possibly better represented a True reading. In conclusion, the deviations obtained predict the accuracy of the Magellan 315 handheld GPS unit to be between 1.0 and 55.2 meters as long as the same conditions are applied. Also, there was no apparent trend displayed by the morning or night deviations but if any of the procedures were changed the results would change also. Materials and Methods All GPS readings were taken from the end of a rock wall located behind Ridgewood Village Apartments, in Blacksburg, Virginia. The GPS readings were taken with a handheld Magellan GPS 315 receiver unit for ten days between September 23 and October 15 2007. Readings were observed and recorded both in the mornings between 7:20 and 8:30 and at night between 7:45 and 9:00. During these times the individual recorded the northing and easting readings every 2 minutes for a period of 12 minutes. To calculate the accuracy, the linear deviation of each new reading was compared to the True initial reading by using the Pythagorean Theorem. The True reading was the first reading that was obtained on the first day of observations (4118019N, 553775E). The deviations were obtained for each new reading and then were used for data analysis. Acknowledgements: This project could not have taken place if it were not for the help of Dr. Brewster and Dr. Mullins. References: Dana, P. H. (2000). "Global Positioning System Overview." Retrieved October 21, 2007, from http://www.colorado.edu/geography/gcraft/notes/gps/gps_f.html. Garmin. (2007). "What is GPS?" Retrieved October 21, 2007, from http://www8.garmin.com/aboutGPS/. Magellan. (2001). "Magellan GPS Accuracy Better than Three Meters with New Product Upgrades." Retrieved October 21, 2007, from http://www.magellangps.com/news/releases/viewRelease.asp?id=74. Pace, Scott, G.P.F., Irving Lachow, David Frelinger, Donna Fossum, Don Wassem, Monica M. Pinto. (1995). "GPS History, Chronology, and Budgets." The Global Positioning System Assessing National Policies. Retrieved October 21, 2007, from http://www.rand.org/pubs/monograph_reports/MR614/MR614.appb.pdf.