Download

1 / 1
10 likes | 179 Views
Matching 3D Shapes Using 2D Conformal Representations Xianfeng Gu 1 , Baba Vemuri 2 Computer and Information Science and Engineering, Gainesville, FL 32611-6120, USA gu@cise.ufl.edu, vemuri@cise.ufl.edu. Abstract

E N D
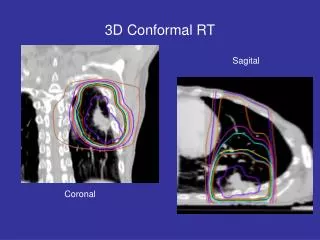
Matching 3D Shapes Using 2D Conformal Representations Xianfeng Gu1, Baba Vemuri2Computer and Information Science and Engineering, Gainesville, FL 32611-6120, USAgu@cise.ufl.edu, vemuri@cise.ufl.edu. • Abstract • Matching 3D shapes is a fundamental problem in Medical Imaging with many applications including, but not limited to, shape deformation analysis, tracking etc. Matching 3D shapes poses a computationally challenging task. The problem is especially hard when the transformation sought is diffeomorphic and non-rigid between the shapes being matched. In this paper, we propose a novel and computationally efficient matching technique which guarantees that the estimated non-rigid transformation between the two shapes being matched is a diffeomorphism. • Specifically, we propose to conformally map each of the two 3D shapes onto the canonical domain and then match these 2D representations over the class of diffeomorphisms. The representation consists of a two tuple , where, is the conformal factor required to map the given 3D surface to the canonical domain (a sphere for genus zero surfaces) and H is the mean curvature of the 3D surface. Given this two tuple, it is possible to uniquely determine the corresponding 3D surface. This representation is one of the most salient features of the work presented here. The second salient feature is the fact that 3D non-rigid registration is achieved by matching the aforementioned 2D representations. • We present convincing results on real data with synthesized deformations and real data with real deformations. • Mathematical Framework for the Proposed Model • Surfaces can be represented as functions defined on their conformal coordinate systems. Suppose and are two surfaces we want to match. Suppose the conformal coordinate domains of and are and respectively. The conformal mapping from to is , the one from to is . Instead of finding the mapping from to directly, we want to find a map , such that Thus, finding a diffeomorphic between and can be achieved by finding a diffeomorphism from to and then using the commutative diagram. • 2D Conformal Representation for surfaces in 3D • We can conformal map surface S to a canonical domain, such as the sphere, then stereographically project the sphere to the complex plane, and use these conformal coordinates (u,v) to parameterize S. Then, We can compute the following two maps directly from the position vector S(u,v). First, the conformal factor map is the conformal factor function defined on (u,v), and conceptually represents the scaling factor at each point. Secondly, the mean curvature function, • where is the Laplacian-Beltrami operator defined on S, n(u,v) is the normal function, H(u,v) is the mean curvature, conformal factor function. The tuple is the conformal representation of S(u,v). • Theorem 1 Conformal Representation surface S(u,v) is parameterized by some conformal parameter (u,v) on a domain D, then the conformal factor function: and mean curvature function H(u,v) defined on D satisfy the Gauss and Codazzi equation. If and H(u,v) are given, also the boundary condition is given, then S(u,v) can be uniquely reconstructed. • 3D Shape matching • Suppose we have two genus zero surfaces and embedded in . Our goal is to find a diffeomorphism , such that minimizes the following functional • If we want to find a conformal map between and , we can restrict to be a Mobius transformation if and are spheres. • The position map S(u,v) is variant under rigid motion, and the conformal factor and mean curvature H(u,v) are invariant under rigid motion. Therefore, it is most efficient to use and H(u,v) for matching surfaces. The matching energy can be also defined as • This energy is minimized numerically to obtain the optimal and then obtain the corresponding from the commutative diagram shown above. • Experimental Results • We define non-rigid motion denoted by ,using affine maps. is represented as • The brain surface S is deformed by a randomly generated , then we match S with using conformal representation, and estimate using the algorithms described in 3D shape matching, denoting the estimated transformation as .We computed the reconstruction error by comparing the original coefficients of and the estimated coefficients of . The result is illustrated in the following table • Numerical experiments results. The deformation coefficients of are generated by a random variable with Gaussian distribution. The difference between and the reconstructed deformation is measured, the mean is close to 0 and the variance is very small. This demonstrates the accuracy of the algorithm. • (a)Conformal factor on brain (b)Conformal factor on sphere (c)Mean curvature on brain (d)Mean curvature on sphere • (1) Conformal representation of brain surfaces. The conformal factor and mean curvature functions determine the surface unique up to a rigid motion. The conformal factor and the mean curvature are color encoded on the brain surface and the sphere, the color temperature is proportional to the value. • (a)Original brain surface (b)Deformed brain surface (c)Displacement by (d)Displacement by • (2) Estimate deformation using conformal representation. Original surface is (a), deformed surface is (b). The displacement fields are color encoded, (x,y,z) are represented by (r,g,b). The displacement field caused by the deformation is shown in (c). The displacement field caused by the estimated deformation is shown in (d). • (a)Hippocampus surface (b)Conformal mapping (c)Conformal factor (d)Mean curvature • (3) Conformal representation of the hippocampus surface. The conformal factor and mean curvature functions are color encoded, the color temperature is proportional to the value. • (4) Different hippocampus surfaces reconstructed from MRI images. The matching results are color encoded. The regions of the same color are matched to one another. • Discussion • In this paper, we introduced a novel method for 3D surface matching using conformal representations, which is based on Riemann surface theories. • All orientable surfaces can be mapped conformally to canonical spaces and represented by conformal factor and mean curvature. Then, 3D surface matching problem can be converted to matching of 2D conformal representations. • In comparison to other matching methods, the new method is more intrinsic and efficient, and can be used to match two isometric surfaces with different embeddings. • Reference: • (1) X. GU, Y. Wang, T. F. Chan, P. M. Thompson, and S. T. Yau. Genus zero surface conformal mapping and its application to brain surface mapping. In IPMI2003, pages 172-184. • (2)P. M. Thompson, M. S. Mega, C. Vidal, J. L. Rapoport, and A. W. Toga. Detecting disease-specific patterns of brain structure using cortical pattern matching and a population-based probabilistic brain atlas. In 17th International Conference on Information Processing in Medical Imaging (IPMI2001), volume 18, pages 488-501, 2001.

![Formula’s and Properties Of 2D and 3D Shapes.! :]](https://cdn3.slideserve.com/6593022/formula-s-and-properties-of-2d-and-3d-shapes-dt.jpg)