模块四 日本 FANUC 数控装置
模块四 日本 FANUC 数控装置. 4.1 FANUC 数控系统概述. 4.2 FANUC 0 系统的配置. 4.3 FANUC 0i 系列配置. 4.1 FANUC 数控系统概述. 4.1.1 FANUC 数控系统特点与系列. 4.1.2 FANUC 数控系统基本构成. 4.1.1 FANUC 系统特点与系列. 特点. 系统在设计中大量采用模块化结构。 具有很强的抵抗恶劣环境影响的能力。其工作环境温度为 0 ~ 45℃ ,相对湿度为 75 %。 有较完善的保护措施。 FANUC 对自身的系统采用比较好的保护电路。

模块四 日本 FANUC 数控装置
E N D
Presentation Transcript
4.1 FANUC数控系统概述 4.2 FANUC 0系统的配置 4.3 FANUC 0i系列配置
4.1 FANUC数控系统概述 4.1.1 FANUC数控系统特点与系列 4.1.2 FANUC数控系统基本构成
4.1.1 FANUC系统特点与系列 特点 • 系统在设计中大量采用模块化结构。 • 具有很强的抵抗恶劣环境影响的能力。其工作环境温度为0~45℃,相对湿度为75%。 • 有较完善的保护措施。FANUC对自身的系统采用比较好的保护电路。 • FANUC系统所配置的系统软件具有比较齐全的基本功能和选项功能。 • 提供大量丰富的PMC信号和PMC功能指令。 • 具有很强的DNC功能。系统提供串行RS232C传输接口,使通用计算机PC和机床之间的数据传输能方便、可靠地进行,从而实现高速的DNC操作。 • 提供丰富的维修报警和诊断功能。FANUC维修手册为用户提供了大量的报警信息,并且以不同的类别进行分类。
1 高可靠性的 PowerMate 0 系列 5 具有网络 功能的超 小型、超薄 型CNC 16i /18i/21i系列 2 普及型 CNC 0—D 系列 3 全功能型 的0—C系列 4 高性能、 价格比 的0i系列 系列
4.1.2 FANUC数控系统基本构成 FANUC 0i 系列 FANUC 6 系列 FANUC 0 系列
FANUC 6 FANUC 6系列属于早年的产品,现在已不再生产,但在十几年前产的有些数控机床上仍然使用。
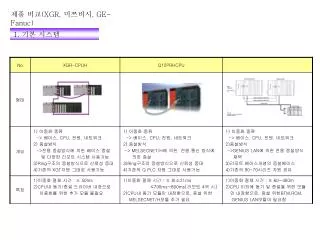
FANUC 0 FANUC 0系统由数控单元本体,主轴和进给伺服单元以及相应的主轴电机和进给电机,CRT显示器、系统操作面板、机床操作面板,附加的输入/输出接口板(B2),电池盒,手摇脉冲发生器等部件组成。 FANUC 0系统的CNC单元为大板结构。 基本配置有主印制电路板(PCB)、存储器板、图形显示板、可编程机床控制器板(PMC—M)、伺服轴控制板、输入/输出接口板、子CPU(中央处理器)板、扩展的轴控制板、数控单元电源和DNC控制板。各板插在主印制电路板上,与CPU的总线相连。
FANUC 0i系统由主板和I/O两个模块构成。主板模块包括主CPU、内存、PMC控制、I/O Link控制、伺服控制、主轴控制、内存卡I/F、LED显示等; I/O模块包括电源、I/O接口、通信接口、MDI控制、显示控制、手摇脉冲发生器控制和高速串行总线等。 FANUC 0i
4.2 FANUC 0系统的配置 4.2.1 控制单元的连接 4.2.2 伺服系统的基本配置
4.1.1 控制单元的连接 FANUC 0系统连接图 M184~M199为轴控制板上的插座编号,其中M184、M187、M194、M197为控制器指令输出端;M185、M188、M195、M198是内装型脉冲编码器输入端,在半闭环伺服系统中为速度/位置反馈,在全闭环伺服系统中作为速度反馈;M186、M189、M196、M199只作为在全闭环伺服系统中的位置反馈,可以接分离型脉冲编码器或光栅尺。H20表示20针HONDA插头,M表示“针”,F表示“孔”。如果选用绝对编码器,CPA9端接相应电池盒。
FANUC 0功能板连接图 存储器板存放工件程序、偏移量和系统参数,系统断电后由电池单元供电保存。同时连接着显示器、MDI单元、第一手摇脉冲发生器、串行通信接口、主轴控制器和主轴位置编码器、电池等单元。 在电源单元中,CP15为24V DC输出端,供显示单元使用,BN6.F为6针棕色插头;CP1是单相AC220 V输入端,BK3.F为3针黑色插头;CP3接电源开关电路;CP2为AC220 V输入端,可以接冷却风扇或其他需要AC220 V设备。
FANUC 0内置I/O接口图 内置I/O接口图:其中M1、M18为I/O输入插座,共计80个I/O输入点;M2、M19为I/O输出插座,共计56个I/O输出点;M20包括24个I/O输入点和16个I/O输出点。这些I/O点可以用于强电柜中的中间继电器控制,机床控制面板的按钮和指示灯、行程开关等开关量控制。
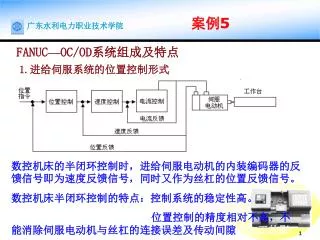
4.2.2 伺服系统的基本配置 S系列进 给伺服系 统的基本 配置 S系列主 轴伺服系 统的基本 配置 数字伺服 有关参数 的设定
电缆K1为NC到伺服单元的指令电缆,K2S为脉冲编码器的位置反馈电缆,K3为AC230/200 V 电源输入线,K4为伺服电机的动力线电缆,K5为伺服单元的ACl00 V制动电源电缆,K6为伺服单元到放电单元的电缆,K7为伺服单元到放电单元和伺服变压器的温度接点电缆。QF和MCC分别为伺服单元的电源输入断路器和主接触器,用于控制伺服单元电源的通和断。 伺服单元的接线端T2—4和T2—5之间有一个短路片,如果使用外接型放电单元,则应将它取下,并将伺服单元印刷电路板上的短路棒S2设置到H位置,反之则设置到L位置。 伺服单元的连接端T4—1和T4—2为放电单元和伺服变压器的温度接点串联后的输入点,上述两个接点断开时将产生过热报警。如果使用这对接点,应将伺服单元印刷电路板上的短路棒S1设置到L位置。
在2轴型伺服单元中,插座CN1L、CN1M、CN1N可分别用电缆K1和数控系统的轴控制板上的指令信号插座相连,而伺服单元中的动力线端子T1—5L,6L,7L和T1—5M,6M,7M以及T1—5N,6N,7N则应分别接到相应的伺服电机,从伺服电机的脉冲编码器返回的电缆也应一一对应地接到数控系统的轴控制板上的反馈信号插座(即L,M,N分别表示同一个轴)。在2轴型伺服单元中,插座CN1L、CN1M、CN1N可分别用电缆K1和数控系统的轴控制板上的指令信号插座相连,而伺服单元中的动力线端子T1—5L,6L,7L和T1—5M,6M,7M以及T1—5N,6N,7N则应分别接到相应的伺服电机,从伺服电机的脉冲编码器返回的电缆也应一一对应地接到数控系统的轴控制板上的反馈信号插座(即L,M,N分别表示同一个轴)。 (1-2) 2轴型伺服单元的基本配置和连接方法
(1-3) 伺服系统结构简图 FANUC的CNC与Alpha系列2轴交流驱动单元组成的伺服系统结构简图,伺服电机上的脉冲编码器作为位置检测元件也作为速度检测元件,它将检测信号反馈到CNC中,由CNC完成位置处理和速度处理。CNC将速度控制信号、速度反馈信号以及使能信号输出到伺服放大器的JVBl和JVB2端口。
(2-1) S系列主轴伺服系统的连接图 K1为从伺服变压器副边输出的AC220 V三相电源电缆,应接到主轴伺服单元的U,V,W和C端,输出到主轴电机的动力线,应与接线盒盖内面的指示相符。K3为从主轴伺服单元的端子T1上的R0,S0和T0输出到主轴风扇电机的动力线,应使风扇向外排风。K4为主轴电机的编码器反馈电缆,其中PA,PB,RA和RB用做速度反馈信号,0H1和0H2为电机温度接点,SS为屏蔽线。K5为从NC和PMC输出到主轴伺服单元的控制信号电缆,接到主轴伺服单元的50芯插座CN1。
(3)数字伺服有关参数的设定 • 柔性齿轮比的设定 • 使用柔性齿轮比功能,脉冲编码器的脉冲数可以适应各种不同的传动机构。 • 具体的设定方法:
二、伺服电动机代码和自动设定以及伺服的优化二、伺服电动机代码和自动设定以及伺服的优化 各个控制轴主要参数 ①初始设定位(initial set bits):#1位为0时进行参数自动设定。设定完成后,该位恢复为1。 ②电动机代码(Motor ID No):电动机的代码(0~99)用于每种电动机。 ③AMR:当使用Alpha系列电动机时,该值为0。 ④CMR2指令倍乘比。 ⑤柔性齿轮比n/m:根据上述介绍的公式设定。 ⑥方向设定Direction Set:用于设定正确的电动机方向。 ⑦速度脉冲数Velocity Pulse:使用A1pha系列电动机时为8192/819。 ⑧位置脉冲数Position pulse:当系统为半闭环,A1pha系列电动机为12 500/1 250;当系统使用全闭环时,取决于反馈脉冲数/转。 ⑨参考计数器Ref.Counter:用于参考点回零的计数器。
4.3 FANUC 0i系统的配置 4.3.1 控制单元的连接 4.3.2 伺服的连接
控制单元主 板与串行主 轴及伺服轴 的连接 控制单元 I/O板与 显示单元 的连接 控制单元主 板的连接 控制单元的连接 控制单元I/O 板内装I/O 卡的连接 系统的电源 控制单元I/0板 与MDI键盘、 手摇脉冲发生器 和RS—232C 串行接口的连接
控制单元I/0板与MDI键盘、手摇脉冲发生器和 RS—232C串行接口的连接图
系统的电源 系统输入电压为DC24 V±10%,电流约7 A。伺服和主轴电动机为AC200 V(不是220 V,其他系统如0系统,系统电源和伺服电源均为AC200V)输入。这两个电源的通电及断电顺序是有要求的,不满足要求会出现报警或损坏驱动放大器。原则是要保证通电和断电都在CNC的控制之下。具体见下表。
4.3.2 伺服的连接 1.FANUC 0i α系列伺服模块型号及接口定义 (1)伺服模块的型号 (2)伺服模块各指示灯和接口信号的定义 2.FANUC 0i α系列主轴模块型号及接口定义 (1)主轴模块的型号 (2)主轴模块各指示灯和接口信号的定义
伺服模块的型号 伺服模块的型号如下所示: SVM □ — □ / □ / □ □ ① ② ③ ④ ⑤ ⑥ ①伺服模块; ②轴数,1=1轴伺服模块,2=2轴伺服模块,3=3轴伺服模块; ③第一轴最大电流; ④第二轴最大电流; ⑤第三轴最大电流; ⑥输入电压,“无字”=200 V,HV=400 V。
SVMl—12伺服模块各指示灯和接口信号的定义(一)SVMl—12伺服模块各指示灯和接口信号的定义(一) 1)直流电源输入端。该接口与电源模块的输出端、主轴模块、伺服模块的自流输入端相连。 2)BATTERY——电池。该电池用于系统断电后,保存绝对型位置编码器的位置数据。 3)STATUS——表示LED状态。用于表示伺服模块所处的状态,出现异常时,显示相关的报警代码。 4)CX5X——绝对型位置编码器电池接口。一般地,与电池连接或在使用分离型电池盒时,与下—伺服模块地CX5Y连接。 5)CX5Y——绝对型位置编码器电池接口。一般地,在使用分离型电池盒时,与下—伺服模块地CX5X连接。 6)S1/S2——接口选择开关。S1为A型接口,S2为B型接口。 7)F2——24 V电源熔丝。 8)CX2A——直流24 V输入接口。一般地,该接口与主轴模块或上一伺服模块的CX2B连接,接收急停信号。 9)CX2B——直流24 V输入接口。—般地,该接口与下一伺服模块的CX2A连接,输出急停信号。
SVMl—12伺服模块各指示灯和接口信号的定义(二)SVMl—12伺服模块各指示灯和接口信号的定义(二) 10)直流回路连接充电状态LED。在该指示灯完全熄灭后,方可对 模块电缆进行各种操作,否则有触电危险。 11)JX5——伺服状态检查接口。该接口用于连接伺服模块状态检查电路板。通过伺服模块状态检查电路板可获得伺服模块内部信号的状态。 12)JX1A——模块连接接口。该接口一般与主轴或上一个伺服模块的JX1B连接,作通信用。 13)JXlB——模块连接接口。该接口—般与下一个伺服模块的JX1A连接。 14)PWM11/JV1B——A型NC数控系统接口。 15)PWM21/JS1B—— B型NC数控系统接口。该接口与FANUC 0i系统控制单元相对应的伺服模块接口JSnA(n为轴号)连接。 16)ENC/JF1——位置编码器接口。该接口只在使用B型接口类型时使用。 17)三相交流变频电源输出端。该接口与相对应的伺服电机连接。
主轴模块的型号 主轴模块的型号如下所示: SPM □ / □ □ ① ② ③ ④ ①主轴模块; ②电动机类型,“无字”=α系列,C=αC系列; ③额定输出功率; ④输入电压,“无字”=200 V,HV=400 V。
SPM—15主轴模块各指示灯和接口信号的定义(一)SPM—15主轴模块各指示灯和接口信号的定义(一) 1)TBl——直流电源输入端。该接口与电源模块直流电源输出端、伺服模块的直流输入端连接。 2)STATUS——表示LED状态。用于表示伺服模块所处的状态,出现异常时,显示相关的报警代码。 3)CX1A——交流200 V输入接口。该端口与电源模块的CXlB端口连接。 4)CX1B——交流200 V输出接口。 5)CX2A——直流24 V输入接口。一般地,该接口与电源模块地CX2B连接,接收急停信号。 6)CX2B——直流24 V输出接口。一般地,该接口与下一伺服模块地CX2A连接,输出急停信号。 7)直流回路连接充电状态LED。在该指示灯完全熄灭后,方可对模块电缆进行各种操作,否则有触电危险。
SPM—15主轴模块各指示灯和接口信号的定义(二)SPM—15主轴模块各指示灯和接口信号的定义(二) 8)JX4——伺服状态检查接口。该接口用于连接主轴模块状态检查电路板。通过主轴模块状态检查电路板可获取模块内部信号的状态(脉冲发生器盒位置编码器的信号)。 9)JX1A——模块连接接口。该接口一般与电源的JX1B连接,作通信用。 10)JX1B——模块连接接口。该接口一般与下一个伺服模块的JX1A连接。 11)JY1——主轴负载功率表和主轴转速表连接接口。 12)JA7B——通信串行输入连接接口。该接口与控制单元的JA7A(SPDL—1)接口相连。 13)JA7A——通信串行输出连接接口。该接口与下一主轴(如果有的话)的JA7B接口连接。 14)JY2——脉冲发生器,内置探头和电动机CS轴探头连接接口。 15)JY3——磁感应开关和外部单独旋转信号连接接口。 16)JY4——位置编码器和高分辨率位置编码器连接接口。 17)JY5——主轴CS轴探头和内置CS轴探头。 18)三相交流变频电源输出端。该接口与相对应的伺服电机连接。