Download
1 / 14
140 likes | 291 Views
NTNU Wave energy colloquia: Comparison of Control Strategies for Wave Power Converters. February 17th, 2006 Jørgen Hals CeSOS/NTNU. Outline. Control strategies for a point absorber. Passive loading. Reactive control . Latching. Analytic results. Numerical results. Comparisons.

E N D
NTNU Wave energy colloquia:Comparison of Control Strategies for Wave Power Converters February 17th, 2006 Jørgen Hals CeSOS/NTNU
Outline Control strategies for a point absorber Passive loading Reactive control Latching Analytic results Numerical results Comparisons Conclusions
Control strategy for wave energy conversion • Why do we need control? • What are the alternatives? • How much do we gain? • Which requirements are imposed on the machinery in terms of capacity and efficiency?
Example study of heaving sphere • Semisubmerged • Radius a=5 m • Eigen period T0 = 4.34 s < Twave. • Amplitude restriction s≤ 0.6 a = 3 m, constant stiffness • No friction • Sinusoidal incoming wave • Linear theory Reference: Hals, Bjarte-Larsson and Falnes: Optimum reactive control and control by latching of a wave-absorbing semisubmerged heaving sphere, OMAE 2002 Figure 1: The object of the study: A sphere of radius a and vertical deviation s from its equilibrium position.
Control strategies • Reactive control • Control by latching • Passive loading Figure 2: The vertical excursion of the sphere for three different control strategies: Reactive control (red),control by latching (blue)and passive loading (black). The wave period T is 9 s and the wave amplitude is 0.5 m
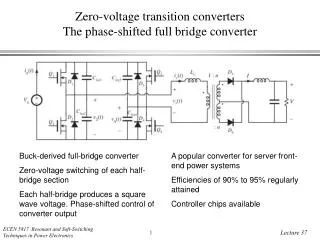
Load impedance and instantaneous power flow for passive loading and reactive control Passive loading Reactive control
Latching control • Position locked when velocity is zero • Release to align velocity and force • Numerical solution of equation of motion • Variation of load and latching instant to find best values.
Absorbed energy with control • Increased average absorption • Increased instantaneous power • Power inversion Figure 3: Accumulated absorbed energy, for three different control strategies: Reactive control (red),control by latching (blue)and passive loading (black). The wave period T is 9 s and the wave amplitude is 0.5 m.
Reactive power for optimum control (1) Figure 4: Reactive power (dashed curve) and converted power (fully drawn curve) for the case of optimum reactive control. The wave period is T = 9 s.
Reactive power for optimum control (2) Figure 5: Reactive power (upper curves) and converted power (lower curves) for the case of optimum reactive control. Values are given for three wave periods T = 6, 9 and 12 s, as shown by the fully drawn curve, the broken line and the dotted line, respectively.
Absorbed power, comparing strategies (1) Figure 6: Maximum absorbed power Pu versus wave amplitude |A| with reactive control (fully drawn curve), latching control (dashed curve) and passive loading (dotted curve). The wave period T is 9 s.
Absorbed power, comparing strategies (2) Figure 7: Maximum absorbed power Pu versus wave amplitude |A| with reactive control (fully drawn curve), latching control (dashed curve) and passive loading (dotted curve). The wave period T is 12 s.
Summary • Numerical example: Semisubmerged sphere in sinusoidal wave • Quantitative comparison of control strategies • Passive loading as reference • Reactive control • Theoretically optimal for unconstrained motion • Reactive power • High instantaneous power • Power inversion • Highly efficient machinery is crucial • Latching control • Slightly reduced power output • Moderate instantaneous power • No power inversion • Efficiency less crucial