R 3
R 3. Ethan Hall Michael Kelton Greg Wegman Vashisht Lakhmani. Packaging Design Outline. Project Description Project Overview Commercial Options Rover Design Packaging Specifications PCB Footprint. Project Description.

R 3
E N D
Presentation Transcript
R3 Ethan Hall Michael Kelton Greg Wegman Vashisht Lakhmani
Packaging Design Outline • Project Description • Project Overview • Commercial Options • Rover Design • Packaging Specifications • PCB Footprint
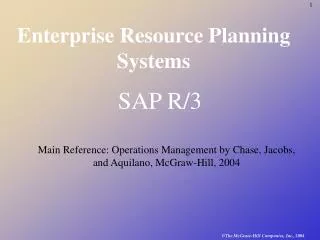
Project Description • The goal of this project is to design and build a miniature replica of the Opportunity, a Mars Exploration Rover. • The replica will ultimately be part of an exhibit in a children’s museum in Indiana.
Project Overview • Replica of Mars Science Laboratory Rover • Docking station to recharge battery • Location Sensing • Use a computer/tablet to control Rover
Commercial Option 1 Pros Cons Surveyor SRV-1 Open SourceSelf Charging Autonomous Not a replica Operation Camera Durability Wifi Connection Not expandable
Commercial Option 2 Pros Cons TP-600-150 RuggedSize (12*17”) Accessibility Price ($3,550) Camera, wifi Tethered Charging
Rover Design • Size specification • Rectangular Body • 6 Wheels with 4 motors • Charging pad at the rear • Camera
Packaging Specifications • Lightweight, portable • Rugged • Durable • Easily modifiable
PCB Footprint BD6211F-E2 LPC1768 • Microcontroller – LPC1768 – Arm Cortex M3 • H Bridges (4) – Controlling motors • Voltage Regulators – 6V – Motors 3.3V – Microcontroller, Accelerometer, Compass, Wifi Adapter, Battery Power Management H Bridge H Bridge Micro-controller H Bridge H Bridge ADXL345 WiFly GSX Accelerometer Wifi Adapter 7” HMC5883L Battery Power Management Compass Peripheral Headers 3.3V 6V 5”