Download
1 / 54
540 likes | 707 Views
A survey on the Group Steiner problem Guy Kortsarz, Rutgers Camden. Steiner Tree. A leading (to say the least) researcher said about Steiner Tree: ‘’A rather un interesting generalization of the Euclidean version” We need more humilty among theory people.

E N D
A survey on the Group Steiner problemGuy Kortsarz, Rutgers Camden
Steiner Tree • A leading (to say the least) researcher said about Steiner Tree: • ‘’A rather un interesting generalization of the Euclidean version” • We need more humilty among theory people. • In practice Multicommodity Buy-at-Bulk is crucial. And it is a many steps generalization of Steiner Tree and Steiner Forrest.
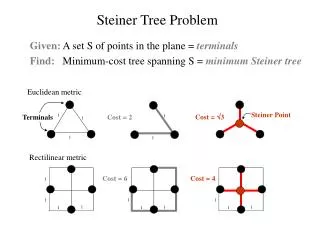
Definitions • Steiner tree. Given an edge weighted graph G(V,E) and a set SV of terminals, find a min cost tree T(V’,E’) that contains all of S. • The Group Steiner Problem is a generalization of this problem. • As we shall see, GSP is ST in case all groups have size 1.
Group Steineron General Graph • Given a graph G(V,E) with edge costs c(e) and a root r. • A group is a subset Uiof V. • We are given k groups U1,….,Uk • The maximum size of a group is m. • A solution is a Tree T(V’,E’), rooted at r so that V’ is a hitting set for {Ui }, namely contains at least one vertex of every Ui
Reduction to trees • Fakcharoenpho Rao and Talwar • A graph can be mapped to distribution of trees. • If we start with a graph G(V,E) the expected cost of en edge (the distance between the two neighbors) does not go down. • The expected length of an edge grows by at mostO(log n)factor.
Redcution to a (random) tree • This means by linearity of expectation that the expected optimum is only O(log n) larger than the optimum in the graph • Thus there is a tree with cost at most O(log n) times the optimum of the graph. • This is a reduction from a graph to a tree! • The O(log n) is tight (for expanders as so many times).
Credit • Bartalwas the first to give such a result with worse distortion. • Bartal defined the HST namely the cost of edges goes down by a fraction each level. • The FRT improvement and entire algorithm is cool and readable. • For example: alternative O(log n) for minimum cost Multicut of pairs. • Gives some immediate approximation like Buy-at-Bulk if the length and the cost are equal.
Group Steiner on trees is nothing but Set Cover with tree costs 3 3 2 10 1 1 1 1 1 1 1
Choosing a Set Cover of size 5 is better than size 1 3 3 2 1 1 1 1 1
The approximation of Garg Konjevod and Ravi • They give O(h log k)-approximation algorithm for Group Steiner on trees. • T= (V; E) rooted at r has depth h. • Implies O(log m* log k) ratio. m max size group, k is # of groups. • Simple proof: Grag and Kandekhar. Unpublished. • The GKR result uses LP methods. • Beautiful.
Directed Steiner Tree • Like Steiner Tree but the graph is directed r t2 t1 t3
Choosing a child with good density • There is a subtree with ti/cost(i) at least t/opt, with cost(i) the cost of the subtree including the edge to the root, t the total number of terminals. • K,Peleg: an algorithm for DST (originally for Shallow light trees!). Analysis not the best. • Idea: guess ti and the identity of the child and recusre with these two values. • Charikar et al. Brilliant anylisis of the K,Peleg algorithm.
The ratio of Charikar et al • Charikar et al: The algorithm of K, Peleg has ratio 1/3 n for every . Time more than n1/ • Gives ratio n for every constant • Interesting is plugging =1/log n • O(log3 n) ratio at quasi polynomial time. • The technique is calledRecursive Greedy. • Invented independently by Zelikovsky • But Charikar et al, used our algorithm word by word.
Directed Steiner Tree • I will present a non recursive greedy solution • Using GST • An important theroem by Zelikovsky: • Take transitive closure. • Among all trees of height at most 1/ there is a solution of cost at most (1/)3 * n 1/
Alternative approximation algorithm for Directed Steiner • Create a graph H in which each path from the root r to some u of length at most 1/,is a node. • There is a directed edge from p’ to p if pextendsp’ by one edge. • By the theorem of Zelikovsky, a solution of cost at mostO(n 1/ )opt isembedded inH.
A non recursive greedy approximation for Directed Steiner • For every terminal t, make a group Ht of all paths of length at most 1/ that start at r and end at t. • This reduces the problem to Group Steineron trees:Connect at least one terminal of Htby a path fromr , for every t .
Directed Steiner tree • This gives a non Recursive Greedy algorithm for Directed Steiner with same ratio: n . Need to teach GST. But the proof of Garget al relatively easy. • The space complexity ~ n1/. • And of course so is the time complexity, but unfortunately, that the best known.
GSF with application for Directed Steiner Forest • The input is an undirected graph G(V,E) with costs ce on edges. • The input also contains a collection of set pairs {Si,Ti} for i=1 to k. • The goal is to select a minimum cost subgraph G(V,E’) so that for every i there is some siSi and tiTi that are in the same connected component.
An example with uniform weights S1 T1 S2 T2 S3 T3
The optimum S1 T1 S2 T2 S3 T3
Approximation ratio • A paper by Chandra, Even, Gupta and Segev gives an O(log 4 n) approximation for the problems. • This uses so called density LP. • This means that every pair of sets is covered within some fraction smaller than 1. • Uses the concept of Junction Trees, shown later.
Directed Steiner Forest • Input: A directed graph G(V,E) with a collection of pairs {si,ti} and cost over the edges. • Find: a subgraph G(V,E’) of minimum cost so that for every {si,ti}, there is a directed path in G(V,E’) from si to ti. • The next construction (in a more complicated way) was presented in a paper by Chekuri, Even, Gupta and Segev.
Reduction DSF to GST • A junction tree is an “in directed’’ tree into r from some X={si} and addition to an “out tree’’ into the sinks of X. • Say that there is a junction tree with good density. How do we find it? • We create the same graph that we created for Directed Steiner Tree. • Make all paths that start at sia Set Si. • Make all paths that start at tia Set Ti.
This gives a GSF instance • By applying the Zelikovsky theorem twice and the O(log 4 n) ratio, gives the density of the junction tree times n. • The graph is directed but all edges are directed into the same direction. • This means that the GSF instance still admits O(log 4 n) ratio approximation. • One of three tools used to approximate DSF.
A network design problem with degree bounds with hard capacities • Consider Steiner Tree with a subset T V of the terminals. • Given L Tfind minimum cost Steiner treeso that every vertex of L has degree 1. N(v) u z w x v(u) v(z) v(w) v(x)
Solution • You can remove every vL from the graph. • The vertex v can not connect two other vertices. • The groups will say which vertex is the neighbor of every vL
Submodular cover with tree costs • Example: say that every set s has a bound b(s) of how many elements it can cover. 3 3 2 10 1 1 1 1 1 1 1
Submodular cover with tree costs • Given a candidate solution, we can compute if feasible with flow computation 3 3 2 10 1 1 1 1 1 1 1
Submodular cover with tree costs • The O(log n) algorithm: add the set that increases the flow by most. 3 3 2 10 1 1 1 1 1 1 1
Submodular cover with tree costs • If all vertices have degree bound 1 but the high degree vertex whose b(x)= 3 3 2 10 1 1 1 1 1 1 1 x
Submodular cover with tree costs • The optimum in this case is 3 10 1 x
A different approximation than GKR • Chekuri Even and K, recursive greedy algorithm for GST. • We “improve to the worse” GKR by giving (log n)(2+)ratio. • The reason for the algorithm that it is combinatorial. Solves an open problem ofGKR • But also seems more flexible.
Used to solve the problem we discussed • Gives around (log n)3 for Submodular cover with tree costs. • GKRdoes not work for this • In another paper, we gave (log n)3 for Submodular Cover with tree costs. I was sure nobody did because the CEK is highly complex. • Found out that Calinesco, Zelikovsky did it before us.
Used to solve the problem we discussed • Gives around (log n)3 for Submodular cover with tree costs. • GKRdoes not work for this • In another paper, we gave (log n)3 for Submodular Cover with tree costs. I was sure nobody did because the ECK is highly complex. • Found out that Calinesco, Zelikovsky did it before us. • Please: Can you work on someone else’s problems?
Integrality Gap Halperin, K, Krauthgamer, Srinivasan,Wang g1,g2 g3,g4 g1,g3,g2 g2,g4 g1,g3 g4 g1,g2 g2
Analysis: • The costs need to decrease by constant factor [HST] • The fractional value is the same at every level • Thus, if the height is Hthen the fractional is O(H) • The integral H2 log k (kis # groups) • (log k)2 gap as H=log k • We now show an (log k)2 ratio for HST.
Algorithm • Take only log k first layers. First layer edges cost 1. • For every vertex assign it all groups in its subtree • Apply GKR. Gives H*log k namely, (log k)2 • Given that v was chosen we add a path from v to each group v is responsible to. • Only the first edge counts (HST) • And its value is at most 1/k
Hardness • Halperin Krauthgamer: Ω(log 2- n) hardness. • CEK: O(log 2 n)/loglog(n)) ratio in quasi polynomial time. • HK used the integrality gap as a black bok • Used the upper bound of GKR when proving the lower bound. • First polylog inapproximability. • Maybe the right ratio is O(log 2 n/loglog n) ?
Covering Steiner Tree • For every Group a number xiof vertices that need to be covered from group gi • O(log2 n) by Konjevod, Ravi Srinivasan. • The following due to Even, K, Slany: for every group create xiBins • Create a new GS (not CS)instance by randomlyputting the vertices of gi in the bins. • The probability that a bin has no optimal terminal: (1-1/xi)xi<1/e
Solve the 1/2-group Steiner problem • Namely cover ½ of the groups. • Expected cost O(log n)*opt • Gives O(log n)2ratio. • Interesting derandomization: Universal Hash Functions.
Generalization of Group Steiner • Naturally, Directed Steiner tree. • In the case we can add directed edges from all terminals of a group to a new vertex, which is now a terminal to cover • The old old difficulty is that in the undirected case this create shortcuts. • GST has been shown to be a special case of Fixed Cost k Flow.
Fixed Cost k-Flow • You have a flow network with costs ce over the edges, and capacities over the edges. • The problem requires sending k flow units from the source to the sink. • The cost is the sum of costs of edges that carry at least one flow unit. • GST being a special case was shown by Hajiaghayi, Khandekar, K, and Nutov
Group Steiner with two vertex disjoint paths to the root r g3 g1 g2 g1 g2 g3
Group Steiner with fault tolerance • I shall consider a toy problem. • Say that all groups have size 2. • And we want two edge disjoint paths from the two terminals to r. • This explain an important technique.
Violated sets Say that X Vis violated if there is only one edge leaving X, but there should be two edges leaving X (i.e., X does not contain r but contains a group). Claim: If X and Y are violated, either XU Y and X ∩ Y are both violated, or X-Y and Y-X are both violated. • Such a family of violated sets is called “uncrossable”.
Why are violated sets uncrossable? For any violated set X, the set X ∩ T must be a sub-tree of T containing an entire group. Plus some non terminals not in T Subtrees are laminar! (i.e., either two subtrees are disjoint or one is contained in the other.) gi X ∩ T
g1 g2 X ∩ T Y ∩ T Y ∩ T g2 g1 X ∩ T The two cases X-Y=X and Y-X=Y X∩Y=Y and XUY=X
Consequence The problem of finding a minimum cost cover of an uncrossable family admits 2 approximation (Primal-Dual)[Goemans, Goldberg, Plotkin, Shmoys, Tardos 94]. Therefore, overall we get +2 with the the constantly changing best ratio for the unweighted Steiner tree problem.
This simple problem is VC hard The groups are all the pairs the edges define. r 1 1 0 1 1 0 0 0 0
The optimal solution r 0 1 1 0 0 0 0