Download
1 / 8
80 likes | 232 Views
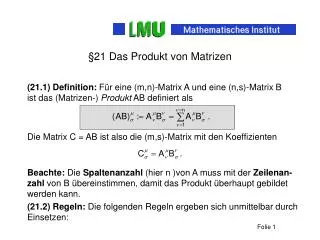
§21 Das Produkt von Matrizen. (21.1) Definition: Für eine (m,n)-Matrix A und eine (n,s)-Matrix B ist das (Matrizen-) Produkt AB definiert als. Die Matrix C = AB ist also die (m,s)-Matrix mit den Koeffizienten.

E N D
§21 Das Produkt von Matrizen (21.1) Definition: Für eine (m,n)-Matrix A und eine (n,s)-Matrix B ist das (Matrizen-) Produkt AB definiert als Die Matrix C = AB ist also die (m,s)-Matrix mit den Koeffizienten Beachte: Die Spaltenanzahl (hier n )von A muss mit der Zeilenan-zahl von B übereinstimmen, damit das Produkt überhaupt gebildet werden kann. (21.2) Regeln: Die folgenden Regeln ergeben sich unmittelbar durch Einsetzen:
Kapitel IV, §21 • 1o t(AB) = (tA)B = A(tB) • 2o A(B + C) = AB + AC • 3o (A + B)C = AC + BC • 4o A(BC) = (AB)C • 5o (AB)T = BTAT Beachte: Im Allgemeinen gilt nicht AB = BA . Zum Beispiel: Oder: (21.3) Lineare Abbildungen als Matrizenprodukt: Aus dem vorletzten Paragrafen ist bekannt, dass sich jede lineare Abbildung
Für den Vektor als Spaltenvektor ist daher Y = f(X) als Spaltenvektor in Kmx1 – – Kapitel IV, §21 bezüglich der Standardbasen durch die Matrix A , gegeben durch eindeutig darstellen lässt: von der Form Y = AX als Matrizenprodukt AX der (m,n)-Matrix A mit der (n,1)-Matrix X . 14.01.02 (21.4) Komposition und Matrizenprodukt: Bezüglich der Standard-einheitsbasen in Kn = Knx1, Km = Kmx1 und Ks = Ksx1 liefert
Die Komposition ist wieder linear und wird gegeben durch das Produkt AB der Matrizen: Kapitel IV, §21 eine (m,n)-Matrix A die lineare Abbildung f = f(A) von Kn nach Km und eine (n,s)-Matrix B die lineare Abbildung g = f(B) von Ks nach Kn . 09.01.02 Facit: Matrizen beschreiben die linearen Abbildungen (§19), ihre Wirkung wird durch das Produkt AX gegeben (21.3) und die Komposition durch AB (21.4). Das Produkt definiert auf Knxn (m = n !) die Struktur einer K-Algebra: (21.5) Definition: Eine K-Algebra ist ein K-Vektorraum H zusammen mit einer Multiplikation mit: 1o t(hk) = (th)k = h(tk) 2o h(k + l) = hk + hl , (h + k)l = hl + kl
Knxn mit dem Matrizenprodukt ist eine assoziative K-Algebra; ebenso Hom(V,V) für einen K-Vektorraum V . Kapitel IV, §21 für alle t aus K und alle h,k,l aus H . Die K-Algebra H heißt assoziativ, wenn stets 3o (hk)l = h(kl) . Die K-Algebra H heißt kommutativ, wenn stets 4o hk = kh . Sei H eine K-Algebra. Ein Element e aus H heißt Eins (-element), wenn stets 5o he = eh = h . In einer K-Algebra H mit Eins e heißt k eine Inverse zu h aus H , wenn 6o hk = kh = e . Ein Element h einer K-Algebra H mit Eins heißt invertierbar, falls eine Inverse zu h gibt.
In dem für uns wichtigen Falle der Algebra Knxn der (n,n)-Matrizen ist die Einheitsmatrix E (= E(n) ) mit die Eins. Kapitel IV, §21 Bemerkung: . 1o Eine Eins ist im Falle der Existenz eindeutig bestimmt und wird auch mit 1 bezeichnet (nicht verwechseln mit 1 in K !). 2o Im Falle der Existenz ist die Inverse zu h eindeutig bestimmt und wird auch mit h-1 bezeichnet. Die invertierbaren Matrizen in Knxn sind die Matrizen, die einen Iso-morphismus definieren, und das sind die Matrizen mit Rang n. §22 (21.6) Beispiele: 1o C(I), der R-Vektorraum der stetigen Funktionen auf einem Intervall I mit Werten in R mit der üblichen Multiplikation (punktweise) ist eine assoziative und kommutative R-Algebra mit Eins: 1(x) = 1. Die invertierbaren Elemente sind genau die Funktionen f ohne Nullstelle und die Inverse ist dann
Kapitel IV, §21 2o Analog liefern die stetigen C-wertigen Funktionen C(I,C) auf I eine assoziative und kommutative C-Algebra. 3o Der K-Vektorraum K[T] der Polynome wird mit der Multiplikation zu einer kommutativen und assoziativen K-Algebra mit Eins. Die Eins ist das konstante Polynom P = a0 mit a0 = 1 . Die invertierbaren Elemente sind die konstanten Polynome P = a0 , wobei a0 von 0 verschieden ist 4oR3 mit dem Vektorprodukt ist eine R-Algebra – die „Drehimpulsalgebra“. Diese Algebra hat keine Eins, denn XY steht immer senkrecht auf Y.
Kapitel IV, §21 Die Algebra ist nicht assoziativ, man teste mit e1 + e2, e1, e2 . Die Algebra ist nicht kommutativ, es gilt aber stets XY + YX = 0 . Die Algebra erfüllt stets ((XY)Z) + ((YZ)X) + (ZX)Y) = 0 . Das ist die Jacobi-Identität, die für Lie-Algebren eine wichtige Rolle spielt. 5o Die Quaternionenalgebra: Sei H := R4 mit der üblichen Vektorraumstruktur und der folgenden Multiplikation: H ist eine assoziative R-Algebra mit 1 (= e1), H ist nicht kommutativ. Jedes von Null verschiedene Element in H ist invertierbar. Verbreitete Notation: 1 = e1, i = e2, j = e3, k = e4 . Dann: i2 = j2 = k2 = -1 , 12 = 1 , ij = k = -ji , jk = i = - kj , ki = j = - ik und 1i = i1 = i, 1j = j1 = j, 1k = k1 = k . XY durch bilineare Fortsetzung. H ist ein Schiefkörper.