SONAR
SONAR. Typ: SRF04. SONAR. Sonar to ultradźwiękowy czujnik odległości, który posiada nadajnik i odbiornik fal ultradźwiękowych. Służy do obliczania przybliżonej odległości od najbliższego obiektu. HISTORIA.

SONAR
E N D
Presentation Transcript
SONAR Typ: SRF04
SONAR Sonar to ultradźwiękowy czujnik odległości, który posiada nadajnik i odbiornik fal ultradźwiękowych. Służy do obliczania przybliżonej odległości od najbliższego obiektu.
HISTORIA • 1822- Daniel Colladen, fizyk szwajcarski, "podwodnym dzwonem" zbadał prędkość dźwięku w wodach jeziora Genewa. W czasach tych rozpoczęto również pierwsze próby określania map dna oceanu w oparciu o proste metody echa dźwiękowego • 1877 - Lord Rayleigh opublikował w Anglii rozprawę naukową "Teoria dźwięku" w której opisał podstawy fizyczne rozchodzenia się fal dźwiękowych • 1880 - Pierre i Jacques Curie odkryli efekt piezoelektryczny w kryształach kwarcu i tytanianu baru. Były to podwaliny do generowania i odbierania fal ultradźwiękowych o częstotliwościach z zakresu milionów cykli na sekundę (megahertzów)
HISTORIA • 1914-1918 - początek rozwoju ultradźwiękowych urządzeń do nawigacji, pomiaru głębokości i odległości w wodzie - używanych przede wszystkim na łodziach podwodnych • 1928 - S. Sokołow w Instytucie Elektrotechnicznym w Leningradzie opracował koncepcję ultradźwiękowego wykrywania wad w metalach i stopach odlewniczych • 1941 - F. Firestone z Uniwersytetu Michigan opracował urządzenie pod nazwą supersonic reflektoscope do wykrywania wad w metalach. W następnych latach nastąpił znaczny rozwój ultradźwiękowych metod badań materiałów głównie za sprawą firm SIEMENS w Niemczech i KRETZ TECHNIK z Austrii
ULTRADŹWIĘKI, ECHO Ultradźwięki to fale dźwiękowe, których częstotliwość jest zbyt wysoka, aby usłyszał je człowiek. Dla większości ludzi są one wyższe niż 20 kHz. Niektóre zwierzęta mogą emitować i słyszeć ultradźwięki, np.: pies, szczur, delfin, wieloryb czy nietoperz. W wyniku odbicia fal dźwiękowych występuje zjawisko zwane echem. Obserwujemy je wtedy, gdy fala dźwiękowa napotyka na swojej drodze przeszkodę, odbija się od niej i wraca do ucha obserwatora powodując powtórzenie wrażenia dźwiękowego. Nie każde jednak odbicie fali powoduje echo. Zjawisko to występuje tylko na dużych przestrzeniach. W małych pomieszczeniach ściany są zbyt blisko by można było usłyszeć echo.
WYTWARZANIE ULTRADŹWIĘKÓW • Metody mechaniczne • Metody termiczne • Magnetostrykcja • Odwrócenie efektu piezoelektrycznego • Metody optyczne
Jest to zmiana długości rdzenia magnesu pod wpływem zmiennego prądu przepuszczanego przez solenoid (walcowa cewka powietrzna [bez rdzenia] w postaci przewodu elektrycznego) nawinięty na ten rdzeń. Zjawisko to znalazło zastosowanie w licznych urządzeniach przemysłowych, w których drgania ultradźwiękowe są wytwarzane zazwyczaj w zakresie niskich częstotliwości. MAGNETOSTRYKCJA
ZASTOSOWANIE • Elektronika (np.: radary, sonary, echolokatory) • Obróbka materiałowa (np.: kamień, szkło, metale) • Medycyna (np.: ultrasonografia) • Przemysł (np.: muzyczny, technologiczny) • Wojsko
ZASTOSOWANIE Robot często musi poruszać się w terenie pełnym przeszkód. Mogą to być chociażby ściany w pokoju. Rzeczą oczywistą jest to, że robot nie może bezmyślnie wjeżdżać na napotykane przeszkody. W związku z tym sonar umożliwia mu bezkonfliktowe poruszanie się w terenie. Ultradźwięk zostaje wysłany i jeżeli powróci do odbiornika, to znaczy że robot natrafił na przeszkodę. Wtedy program obsługujący robota określa czy przeszkoda jest wystarczająco daleko by mógł on iść do przodu. Lub zmienić kierunek. Innym sposobem jest wykorzystanie podczerwieni.
SONAR SRF 04 Napięcie: 5v Prąd: 30mA Typ. 50mA Max częstotliwość: 40KHz Max zasięg: 3 m Min zasięg: 3 cm Waga: 11.3 g Wielkość: 1.75” w x 0.625" h x 0.5" d Wrażliwość: wykrywalność od 3 cm średnicy na początku do 2 m na trzecim metrze Wejściowe dane: poziom pulsu układu TTL 10uS Min. Echo sygnału: szerokość sygnał układu TTL jest proporcjonalna do zasięgu.
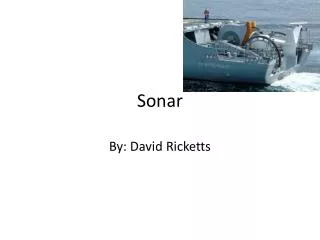
WYKRES Z OSCYLOSKOPU odległość = prędkość dźwięku w powietrzu * czas sygnału echa
POMIAR ODLEGŁOŚCI Gdy robot napotka przeszkodę urządzenie emituje fale dźwiękowe. Następnie program realizuje pomiar czasu powrotu echa odbitej fali od przeszkody. W pomiarze odległości nie ma znaczenia moc odbitej fali a jedynie czas zarejestrowania echa przez odbiornik.
PROGRAM '****************************************************** ' Zmierzenie odleglosci sonarem '****************************************************** Sprawdz_sonar: //wykrywanie przeszkody Set Portc.4 //wypuść wiązkę dźwięku Waitus 15 //odczekaj 15 ms Reset Portc.4 //zakończ wypuszczanie wiązki Pulsein Czas_imp , Pine , 7 , 1 //zapisz czas powrotu wiązki If Err <> 0 Then //jeśli nie znaleziono przeszkody to… Czas_imp = 65535 //wykonaj kolejny krok End If //koniec wykrywania przeszkody Return //powrót do programu głównego
OBJAŚNIENIA • Set zmienna.x - ustawia określony bit x w stan 1 zmiennej • Waitus x - przerywa działanie programu na określony czas x • Reset zmienna.x - ustawia określony bit x w stan 0 zmiennej • Pulsein zmienna, PINx, numer końcówki, zbocze - zwraca ilość jednostek czasowych, pomiędzy dwoma zboczami impulsów gdzie, zmienna do której wpisany będzie czas, wyrażony w jednostkach czasowych, PINx jest nazwą rejestru wejściowego portu, nr_końcówki to numer testowanej końcówki w podanym porcie PINx, zbocze określa przejście stanu na końcówce jakie ma być brane pod uwagę • Err - zwraca 1 gdy wystąpił błąd
KONIEC DZIĘKUJE ZA UWAGĘ …