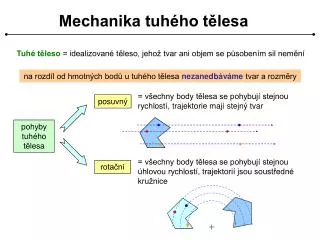
Tuhé teleso
Tuhé teleso. Dokonale tuhé teleso. je také teleso, ktorého ktorákoľvek dvojica bodov zachováva počas pohybu telesa svoju vzájomnú vzdialenosť. vyhovuje predstava hm. b. Dokonale tuhé teleso nemení svoj tvar – je nedeformovateľné.

Tuhé teleso
E N D
Presentation Transcript
Tuhé teleso Dokonale tuhé teleso je také teleso, ktorého ktorákoľvek dvojica bodov zachováva počas pohybu telesa svoju vzájomnú vzdialenosť vyhovuje predstava hm. b. Dokonale tuhé teleso nemení svoj tvar – je nedeformovateľné Všetky zákony pre sústavu hm. b. budú platiť aj pre tuhé teleso.
Skladanie síl v tuhom telese posunutie pôsobiska sily v priamke sily A B Účinok sily na teleso sa nemení, keď vektor sily posúvame po jej vektorovej priamke A F A Skladanie rôznorodých síl: • Posunieme vektory sily po vektorovým priamkam do spoločného bodu B B • Určíme (graficky) výslednicu síl • Posunieme výslednicu síl po jej vektorovej priamke do ľubovoľného bodu telesa
je výslednica síl, pôsobiacich na teleso alebo • Veta impulzová (translačný pohyb) a Veta impulzová (rotačný pohyb) Pohybové rovnice tuhého telesa Plná analógia vzťahov pre SHB a TT: je zrýchlenie ťažiska
Moment dvojice síl A B Odvodenie momentu dvojice síl: 0 dvojica síl – 2 rovnako veľké a opačne orientované sily, ležiace mimo priamky sily
Polohový vektor ťažiska tuhého telesa (TT) z y x SHB TT Trojrozmernételeso (Objemová hustota) Dvojrozmerné teleso (Plošná hustota) Jednorozmerné teleso (lineárna hustota)
je výslednica síl, pôsobiacich na teleso alebo • Veta impulzová (translačný pohyb) a Veta impulzová (rotačný pohyb) Pohybové rovnice tuhého telesa Plná analógia vzťahov pre SHB a TT: je zrýchlenie ťažiska
Podmienky rovnovahy pre tuhé teleso 1. V.I. Keď 2. V.I. Keď Rovnovážna poloha – platia podmienky rovnováhy • Stabilná – pri vychýlení z RP vzniká sila (resp. moment sily) navracajúca teleso do RP • Labilná • Indiferentná
Rovnováha rebríka O Ft1 FN1 r FN2 r Fg Ft2 d3 Vzhľadom k bodu O d1 d2
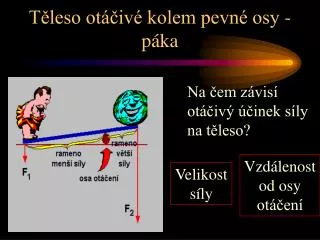
Otáčanie tuhého telesa okolo pevnej osi Pevná os je os, ktorá sa nepohybuje otáčanie = rotácia Element telesa dm má kinetickú energiu: Celé teleso má kinetickú energiu: wje pre všetky body telesa rovnaká SHB [kg.m2] 1
3. Steinerova veta - vyjadruje vzťah medzi momentmi zotrvačnosti vzhľadom na rovnobežné osi, z ktorých jedna prechádza ťažiskom: o oo dm r ro T je súradnica ťažiska vzhľadom na os prechádzajúcu ťažiskom Steinerova veta Momenty zotrvačnosti vzhľadom na rovnobežné osi, z ktorých jedna prechádza ťažiskom sa líšia o m.a2, kde a je vzdialenosť týchto osí. 8
Vlastnosti momentu zotrvačnosti 1. Moment zotrvačnosti je aditívna funkcia 2.Hlavné osi rotácie – osi, ktoré nemenia orientáciu v priestore pri rotacii telesa • Pre ľubovoľné teleso sa dá nájsť 3 navzájom koľme osi, prechádzajúce cez ťažisko, ktoré sú hlavnými osami • Pre symetrické teleso hlavne osi sú osi symetrie z obdĺžniková doska, alebo tyč: L y T L doska tvaru rovnoramenného trojuholníka: obruč: x a a plný valec, alebo doska tvaru kruhu: 7
Moment hybnosti tuhého telesa Dokážeme, že len pre hlavné osi Určíme pre tyč, ktorá sa otáča okolo zvislej osi, prechádzajúcej ťažiskom pod uhlom ku tyči z Zložka v smere tyče z zložka po osi Len pre (hlavná os a osi im rovnobežné) dm L
Precesia Kardanov záves M FN Fg Gyroskop je zariadenie na meranie, alebo udržiavanie rovnakej orientácie, resp. rovnakého smeru.
Keď os nie je hlavná ( /2) Pre zložky vektorov na os otáčania platí sa vektor Za čas Nech , to znamená že veľkosť vektora sa nemení ( ) pootočil o uhol , z pritom čo privádza k rotácie vektora L tak že jeho koniec pohybuje po kružnice. Teleso koná precesný pohyb. to znamená, že v každý okamih
Rotácia okolo ľubovolnej osi Podobne Označenie:
je tenzor momentu zotrvačnosti (mení smer vektora) Pohybová rovnica rotujúceho telesa Tenzor momentu zotrvačnosti Hlavné osi:
Vplyv odstredivých síl z dm Momenty Mx a My vyvíjajú rotáciu okolo osi kolmej na os z
Valenie Valenie ako kombinacia posuvného a otáčavého pohybu Valenie ako otáčavý pohyb
Ak sa pohybuje aj os otáčania, pohyb je zložený: z posuvného(translačného) a otáčavého (rotačného) pohybu. Potom kinetická energia je zložená z kinetických energií oboch pohybov: Valenie P Kinetická energia 3
Príklad: Z definície vypočítajte moment zotrvačnosti dutého valca (r1,r2,h) vzhľadom na jeho geometrickú os. Riešenie: r – vzdialenosť dm od osi otáčania r2 r1 r dh h dr ds
Príklad: Z definície vypočítajte moment zotrvačnosti dutého valca (r1,r2,h) vzhľadom na jeho geometrickú os. Riešenie: r – vzdialenosť dm od osi otáčania r2 r1 r dr h