Download
1 / 38
380 likes | 495 Views
Explore the complexities of binocular vision, including binocular summation, interocular suppression, and binocular rivalry. Understand the importance of binocular interactions in models of stereopsis and vision deficits in clinical populations. Learn about binocular contrast sensitivity and techniques for measuring binocular summation ratios.

E N D
Tutorial notes in vision scienceBinocular InteractionsTSM2 Dr Tim S. Meese t.s.meese@aston.ac.uk Last updated: March 25th 2009
Key References The references in this list either (1) make an important contribution to the points developed in this lecture or (2) provide valuable reviews or expositions; or both. All are recommended reading. Highlights indicate essential reading You will be directed to these at appropriate junctures during the PPT. You will also be given a few exercises to perform highlighted in red The PPT might also include other references not included in this list which are less central to understanding the lecture • Baker, Meese & Summers (2007) • Baker & Meese (2007) • Baker, Meese & Georgeson (2007) • Baker, Meese & Hess (2008) • Baker, Meese, Mansouri & Hess (2007) • Campbell & Green (1965) • Ding & Sperling (2006) • Legge (1984a, 1984b) • Legge (1979) • Levi, Harwerth & Smith (1979) • Levi & Li (2009) • Li, Peterson, Thompson, Duong & Freeman (2005) • Li, Thompson, Duong, Peterson & Freeman (2006) • Meese, Georgeson & Baker (2006) • Meese & Summers (2009) • Meese & Williams (2000) • Moradi & Heeger (2009) • Sengpiel & Vorobyov (2005) • Wilson (2003)
Binocular vision: Some of the issues • Strictly speaking, any animal that has two eyes can be said to have binocular vision, but the term is usually reserved for those with binocular overlap. Mammals with substantial binocular overlap usually have the benefit of stereopsis, which provides acute depth perception; essential for predators. However, in this lecture we are concerned simply with the contrastinteractions between the eyes; specifically binocular summation, interocular suppression, amblyopic suppression and binocular rivalry. • Amongst the various problems posed for binocular vision are these: • We have two retinal images, but only one subjective picture of the world. So how are the retinal images combined? • With the exception of depth perception (from stereopsis), the world doesn’t change very much when you close one eye, even though the visual input is halved (this is called ocularity invariance). How is this achieved? • We need to understand binocular interactions because: • They are important for the development of models of stereopsis. • They can provide insights into the details of signal processing in early vision. • They are important for understanding binocular deficits in clinical populations such as amblyopes.
Shutter goggles monitor Chin and head rest mirrors Technicalnote • A measure often reported in the literature on binocular interactions is the binocular summation ratio (sometimes called ‘binSR’, or ‘BS ratio’). • Applications vary, but it is often an indication of binocular contrast sensitivity relative to monocular contrast sensitivity. In other words: binSR = Cmon/Cbin where Cmon and Cbin are the contrast detection thresholds measured with one and two eyes respectively. • There are two main questions/issues that surround the derivation of binSR. • What measure should be used for Cmon? Some authors have measured sensitivity for only the dominant eye, some have taken the average of each eye, and some have taken that for the most sensitive eye. The safest approach is to either (i) establish that sensitivity for each eye is the same, and then take the average or (ii) if sensitivity is not then same, adjust the contrast in the weaker (or stronger) eye to normalize the two in the binocular condition. • During monocular viewing, what should be done with the other eye? A common approach is to place a patch over the non-viewing eye. This is simple, but not good scientific practice as it introduces two confounds: (i) the observer is wearing a patch in one condition but not the other other (ii) the mean luminance in each eye is not constant across the experimental conditions. A much cleaner approach is to arrange that the ‘non-viewing’ eye is presented with the same mean luminance as the other eye. The best ways of doing this are to use either (i) a mirror stereoscope, which allows the two eyes to see different parts of the display monitor, or (ii) ferro-electric shutter goggles, which allow different stimuli in the same part of the display to be presented to different eyes using rapid frame interleaving (e.g. 60 Hz). The equipment for the two methods are shown below. • Sometimes the binSR is expressed in dB by taking the logarithm (base 10) and multiplying by 20 (see also TSM1)
Prologue • The study of binocular interactions has a long history • Our aim is not to chart out the entire history, or even just the history since the advent of modern vision science • Instead, we introduce old (and important) questions, and provide them with contemporary answers, with references to early work as appropriate
PART 1 • Binocular summation at threshold
Working at detection threshold • Why work at detection threshold? • There are several advantages in using stimuli around detection threshold. These include: • It helps to isolate the detecting mechanism (the mechanism used by the observer to detect the stimulus). • It avoids complicating factors such as contrast gain control (see TSM1) which are probably influential only above detection threshold. • The task (contrast detection) is a simple one, which makes data interpretation less complicated.
L output + R G() Two eyes are better than one, but by how much? • We now consider four different models of binocular contrast summation at threshold where the stimuli in each eye are identical patches of sine-wave grating. • The critical factor in detection studies is the signal to noise ratio (SNR) at the decision stage, shown here as the output. This is expressed as the signal level divided by the standard deviation of the noise. Without loss of generality we can assume a noise source with unit variance and therefore unit standard deviation (recall from basic statistics that the standard deviation is the square-root of the variance). • In the first model we consider, the noise is late, which means it is added just before the decision stage. (Note that this means that for this model the noise at the decision stage does not depend on the number of eyes stimulated.) • Without loss of generality we assume that the stimulus is detected when the SNR is unity, which happens at a criterion level of percent-correct in 2IFC (e.g. 75% correct). This is our working definition of detection threshold. When the signal is presented to only one eye (e.g. the left), then at detection threshold we have: output = 1 = Cmon/ where Cmon is the monocular contrast. Thus Cmon = 1. When the signal is presented to both eyes we have: output = 1 = (Cbin+Cbin)/ where Cbinis the binocular contrast. Thus, Cbin = 0.5 and the BinSR = 2. This is really a rather long-winded way of saying 0.5+0.5 = 1, but we shall see that this sets up the thinking needed in some of our further examples.
L output + R G() ()m ()m Two eyes are better than one, but by how much? • This next model is similar to the previous one, but we have inserted a nonlinear contrast transducer on each of the monocular input lines. We will first suppose that m = 2, consistent with the square-law that we have met previously (TSM1). This is also the model of binocular summation developed by Legge (1984) and is sometimes called the quadratic summation model. • Once again, the noise is late and so it has the same level at the decision stage (output) for both monocular and binocular stimulation. • Note that we could insert further nonlinear transducers after the limiting noise (G()), but this would have no affect on our estimate of Bin SR for this model. Exercise: You should demonstrate to yourself that this is so. We calculate the BinSR as before. When the signal is presented to only one eye we have: output = 1 = Cmonm/ Thus, Cmon = 1. When the signal is presented to both eyes we have: output = 1 = (Cbinm+Cbinm)/ This rearranges to give: Cbin = (1/2)1/m. Thus, for m = 2, Cbin = 1/sqrt(2) and the BinSR = sqrt(2). Or, more generally, we have: BinSR = 21/m
G() G() outmon + L outbin switch and decision R outmon + Two eyes are better than one, but by how much? • This next model is similar to the first one but we have moved the limiting source of noise to the left hand side of the binocular summation box. That is, there are two independent sources of noise (1, 2), one on each monocular line. • We further assume that the observer knows what the stimulus is and can use this information in an ideal way. That is, they know whether the stimulus is binocular or monocular, and to which eye it is presented. This means that we must add two monocular output lines and allow the observer to decide which of the three lines to monitor. This model is sometimes known as the signal known exactly, ideal observer model. In the binocular context this model was first considered by Campbell & Green (1965). • Note that if the observer were unable to access the monocular outputs then the model would revert to the first model we considered because signal and noise would always be summed, regardless of the stimulus. This is formally equivalent to assuming a single source of late noise. We calculate the BinSR as before. When the signal is presented to only one eye the observer switches to that eye and there is only one source of noise that affects the output. This gives: output = 1 = Cmon/ Thus, Cmon = 1. When the signal is presented to both eyes the observer sums signal and noise. To sum the noise sources we add their variances and then convert back to the standard deviation. Thus we have: output = 1 = (Cbin+Cbin)/sqrt( This rearranges to give: Cbin = sqrt(2)/2 = 1/sqrt(2). Thus, the BinSR = sqrt(2).
G() G() outmon + L monitor and decision R outmon + Two eyes are better than one, but by how much? • Our last model involves no physiological summation of signal contrast at all. It supposes two independent monocular lines. The simplest interpretation of this model would predict no binocular summation; that is, binSR = 1. • However, in principle, an observer with this visual architecture could benefit from two eyes over one owing to probability summation. This is to say that you are are more likely to detect a stimulus if you have two goes at it (two eyes) than one. By analogy, you are more likely to get a head with two coin tosses than with one (a probability of 0.75 instead of 0.5). • This form of summation has been implemented widely in various vision models in the literature. But illustrating its predictions for BinSR is not straightforward. A well-known implementation is derived from high threshold theory (e.g. see Meese & Williams, 2000 and references therein for development and discussion), but this theory is known to be wrong (e.g. See Nachmias, 1981) and has been superseded by predictions couched in signal detection theory (Pelli, 1985; Tyler & Chen, 2000). (We will meet this important concept again in TSM3.) Here the observer does not sum either signal or noise, but both can impact the observer’s sensitivity. According to some analyses (see Meese & Williams, 2000) and typical psychometric functions, probability summation is less effective than physiological summation and we might expect binSR ~ 1.2. According to more sophisticated analysis (e.g. Tyler & Chen, 2000), we might also expect binSR ~ 1.2 under many situations for this model. However, if the observer is able to monitor just the two relevant mechanisms (i.e. they have no intrinsic uncertainty) and the target stimulates either one or both of these mechanisms then, in this extreme, binocular summation can rise to binSR ~ sqrt(2) for this model, but cannot exceed this.
Linear summation model BinSR = 2 (6dB) Quadratic summation model (m=2) BinSR = sqrt(2) (3dB) L L output output + + R R Ideal summation model BinSR = sqrt(2) (3dB) Probabilty summation model Typically, BinSR ~ 1.2 (1.5dB), but can be BinSR ~ sqrt(2) (3dB) G() G() G() G() G() G() outmon + L outmon + monitor and decision L R ()m outmon outbin + switch and decision R outmon + ()m Four models of binocular summation • Here we reprise the four models and their levels of summation
So which model is correct? • Early reports from psychophysical experiments were that BinSR is about √2 (Campbell & Robson, 1965; Legge, 1984). • This is too much summation for the probability summation model. • It is not enough summation for the linear summation model. • It is consistent with both the ideal summation model and the quadratic summation model, so either of these seem viable. • However, more recent work (Meese, Georgeson & Baker, 2006; Baker, Meese & Summers, 2007; Baker, Meese, Mansouri & Hess, 2007; Meese, Challinor & Summers, 2008; Meese & Summers, 2009) has found Bin SR ~ 1.7, consistently > √2. This level of summation can be reached in the models in either of two ways, as we will see in the next two slides. • Exactly why the earlier work failed to find a consistent level of summation as high as the later work is not clear, but methodological factors might be important. For example, Meese, Georgeson & colleagues used horizontal target gratings which are less sensitive to vergence errors than vertical gratings.
G() G(3) G(4) G() outmon switch and decision outmon But binSR ~ 1.7 is not consistent with any of our existing models! How can this be fixed? • The ideal summation model can be modified by inserting additional additive noise sources (G(s3) & G(s4)) on two of the outputs. If these noise sources are so high that they dominate the input noise then, effectively, they severe these two output lines. • In that case, the model becomes equivalent to the linear summation model because the most efficient thing to do is always sum the two input lines. • That is equivalent to a single source of late noise on the binocular output, which predicts that binSR = 2. • By adjusting the relative levels of noise at the early and late stages the model can be set to match the empirical levels of summation. Multiple noise source model sqrt(2) < BinSR < 2. (3dB < BinSR < 6dB) + + L outbin R + +
Nonlinear summation model (m=free parameter) BinSR = sqrt(2) (3dB) L output + R G() ()m ()m But binSR ~ 1.7 is not consistent with any of our existing models! How can this be fixed? • Another approach is given by the quadratic summation model. In that model, a binSR of √2 was achieved by setting the exponent of the accelerating contrast transducer m = 2. When this is reduced to m = 1 we have the linear summation model again and binSR = 2. By setting it somewhere in between it is possible to match the empirical level of binocular summation. A value of m = 1.3 is about right. Exercise: derive an expression to calculate this analytically. You might want to go back to the slide in which the quadratic summation model was introduced, then rearrange the equation for binSR. • The approach here is the one that has been adopted in our psychophysics laboratories at Aston. However, it means that the transducer exponent is now much lower than the one that worked so well for contrast masking (where m ~ 2.4) in TSM1. This problem can be overcome by adding a further stage of contrast transduction after binocular summation (not shown). Essentially, this is what was done by Meese et al (2006). • We shall now turn to that work and the issue of binocular summation above detection threshold.
PART 2 • Binocular summation above threshold
Most of what we see, we see very clearly! • Most of what we see takes place in normal viewing conditions where images are well above detection threshold. • It is natural then to ask how vision operates in this situation (as we did in TSM1). • But here we have a particularly pressing reason to do so: • We have seen that at contrast detection threshold we benefit from using two eyes. • This is achieved by a form of contrast summation across the eyes. • Now close one eye. Then open it again. Why did the world not appear to increase in contrast when you opened your eye? • It would seem that vision does not operate in the same way above detection threshold as it does at detection threshold…
Is contrast averaging the solution? • Above detection threshold one simple solution might be to calculate the average contrast measure across the eyes. For example, with one eye open a grating might have a contrast of say 20%. With both eyes open, each eye sees 20%, therefore the average is 20%, and the grating looks the same with one eye and two. • But perhaps matters are not this simple. In the example above, one can argue that the when one eye is closed, the total number of eyes is one, and that the average contrast is therefore the same in the two situations. However, what happens when instead of closing one eye, the observer is presented with mid-luminance and zero contrast in one eye, and the same mid-luminance but a grating with 20% contrast in the other eye. There are two ‘seeing’ eyes in both conditions, so does this halve the perceived contrast as the contrast averaging idea would predict ([20% + 0%]/2 = 10%)? • Careful psychophysical experimentation shows that this does not happen. Legge & Rubin (1981) were the first to address this, and a closely related study was performed by Baker, Meese & Georgeson (2007).
Binocular contrast-matching results. Figure adapted from Baker et al (2007) EXPERIMENT: In each experimental session there were two stimuli. One of them had the contrast shown in the figure legend (here) in one eye. Averaging model Quadratic summation model ‘Two-stage’ model And it had the contrast shown on the x-axis (here) in the other eye. The observer then adjusted the overall contrast (using a staircase procedure) of a matching stimulus so that the two stimuli looked the same. The matching stimulus was either a grating with the same contrast in both eyes (binocular, bottom row) or a grating whose contrast in one eye was set to zero (monocular, top row), The data points in the panels here are the experimental results for a single observer, DHB. The lines and curves in the panels show the predictions for three different models. The averaging model is shown on the left (A,D) and provides a very poor account of the data. The middle panels (B,E) show the predictions for a quadratic summation model. This model squares the left and right eye contrasts before taking their sum (or their average, which is an equivalent process when both eyes are involved, as here). It is an improvement over the averaging model, but still not a good account of the data. The panels on the right (C,F) are for the “two-stage” model of Meese et al (2006). This provides a fairly good account of the data (see next slide for further details).
Binocular contrast-matching: Conclusions • These results (and those of Legge & Rubin, 1981) clearly reject the simple binocular averaging model. • They also reject a simple development of this model where the contrasts are first squared (the quadratic summation model). • The two-stage model of Meese et al (2006) provides a good account of the matching results here. So how does that model work? • In effect, the two-stage model performs a weighted summation of the contrasts in the two eyes (subject to the exponent m), where the weights are proportional to the relative contrasts in the two eyes. Quantitatively, we have something almost equivalent to this: LeftWeight = LeftContrast/(LeftContrast+RightContrast) and RightWeight = RightContrast/(LeftContrast+RightContrast). • Thus, when the contrast in one eye dominates, perception is dominated by that eye. But when contrast is balanced across the eyes, then we have the average. • The “two-stage” model not only achieves the computation above, but it is also able to perform contrast summation at detection threshold (consistent with the BinSR ~ 1.7 result in Part 1), which helps the observer to detect faint stimuli. Thus, the binocular processing of contrast appears well adjusted to the various demands that are placed upon it. • We shall outline some of the details of the two-stage model in the next few slides.
The ‘two-stage’ model of contrast gain control • How are binocular computations implemented in the visual system? • One method might be to develop the ideas of contrast gain control from TSM1. • We can envisage each of the monocular channels (stage 1) arranged as follows: where the C terms are contrasts measured by oriented filters in the left and right eyes, m is the exponent of an early contrast transducer and S is a constant (sometimes called a saturation constant). Note the similar forms of these expressions to those that we encountered in TSM1. A binocular stage is then given as follows: Bin_stage = Stage1left_eye + Stage1right_eye This is simply the sum of the two monocular stages.
Operating at threshold • The expressions from the previous slide are shown in the bottom right for ready reference. • When operating at threshold, the denominators are dominated by S, so the Bin_stage expression simplifies to: Bin_stage ~ Cleftm+Crightm which is the expression that we need from Part 1. Bin_stage = Stage1left_eye + Stage1right_eye
Operating above threshold • The expressions from before are shown in the bottom right for ready reference. • When operating above threshold, the C terms in the denominators dominate S, leaving: Bin_stage ~ (Cleftm+Crightm)/(Cleft+Cright) Thus, when Cleft= Cright, we have 2Cleftm/2Cleftfor the binocular case and Cleftm/Cleft for the monocular case, which are equal, just as we require for binocular averaging. • In other words, above threshold, the benefit of binocular summation is offset by the extra suppression in the contrast gain control. Bin_stage = Stage1left_eye + Stage1right_eye
Binocular summation of contrast above threshold • As we have seen: • a property of the ‘two-stage’ model is that it sums left and right contrasts (from similar filters) at threshold and above. • However, the performance benefit of binocular summation is not typically seen above threshold (Legge, 1984; Meese et al, 2006) because of the divisive effect of binocular contrast gain control. This is also a property of the ‘two-stage’ model. • If this model is correct, it should be possible to reveal the property of the binocular summing process above threshold by holding the contribution to the denominator (suppression process) of the model equation approximately constant, and increasing only the numerator. • This can be achieved by performing pedestal masking experiments (contrast discrimination, TSM1) where the pedestal contrast is the same in both eyes, and the target increment is made to either one or both eyes. Target contrasts Full binocular condition Half-binocular condition contrast Pedestal contrasts Left Right Left Right
Binocular summation of contrast above threshold • Here we see dipper functions for an experiment performed by Meese, Georgeson & Baker (2006). The curves are fits of the ‘two-stage’ model. (conventional monocular and binocular conditions) (binocular and novel half- binocular conditions from previous slide) So, the binocular summation ratio is actually about 1.7 at threshold and above, so long as the experimental conditions are appropriate to reveal it. Pedestal contrast (dB) Pedestal contrast (dB) Once the pedestal contrast is greater than detection threshold, contrast discrimination with one and two eyes is very similar (see also Legge 1984). However, when the same pedestal contrast is presented to both eyes, binocular summation of contrast is seen for all pedestal contrasts.
Architecture for binocular interactions • The visual architecture proposed by Meese et al (2006) is shown below. • Note the interocular suppression. This is also a feature of closely related schemes proposed by Ding & Sperling (2006) and Moradi & Heeger (2009). • Note that in this lecture we have paid little attention to the second stage of contrast gain control. This is a technical detail that is needed to fit the contrast discrimination data and will not be considered here. • You should now read Meese et al (2006). Green lines indicate excitatory pathways Red lines indicate suppressive pathways The arrows denote division
PART 3 • More suppressive interactions
Evidence for interocular suppression: Phase effects • What psychophysical evidence is there for interocular suppression? • EXPERIMENT: Baker & Meese (2007) performed a dichoptic pedestal masking experiment where the target grating was presented to one eye and the pedestal was presented to the other eye. With this arrangement, masking is very powerful (close to Weber’s Law) and the dipper region is very shallow (see earlier work by Legge et al, 1979; Meese et al, 2006; Baker & Meese, 2007). The entire experiment was done using pedestal and targets that were in phase (e.g. sine and sine) and in antiphase (e.g. sine and -sine). • RESULTS: If binocular summation were to take place for both arrangements then the results should be very similar; after all, both arrangements would involve simple comparisons of total contrast across 2IFC intervals (either an increment or a decrement of the pedestal contrast in the null 2IFC interval). However, Baker & Meese found that masking was weaker when the pedestal and target were in antiphase than when they had the same phase. • CONCLUSIONS: This result argues against a within-channel model of dichoptic masking following binocular summation of signals (Legge, 1984). But it is consistent with a process involving suppression between the eyes (see Baker and Meese for details). In this case, the extra masking for the in-phase case results from binocular combination of the target and dichoptic mask which happens only when they are in-phase. Indeed, Baker and Meese fitted the two-stage model to the in-phase results and found that it predicted the results for the anti-phase case when binocular summation was severed, but interocular suppression remained intact.
Evidence for interocular suppression: functional imaging • Moradi & Heeger (2009) performed experiments using fMRI to compare monocular, binocular and dichoptic pairs of stimuli that were either at the same orientation or orthogonal. • Their analysis led them to conclude that each monocular channel is subject to binocular suppression (i.e. self-suppression and interocular suppression) just as the two-stage model of Meese et al (2006) predicts.
Evidence for interocular suppression: XOS • Several experiments have measured cross-orientation effects (and cross-spatial frequency effects) of suppression (TSM1) within and between ocular channels (Legge, 1979; Meese & Hess, 2004; Baker, Meese & Summers, 2007; Baker & Meese, 2007; Meese & Baker, 2009). • Baker et al (2007) asked whether monocular and dichoptic masking assert their influence before or after binocular summation. • LOGIC: Consider the situation below. • In (A) cross-orientation suppression (XOS) is placed after binocular summation. Therefore, it wont matter whether the target is presented to the same eye or a different eye from the mask, the level of masking must be the same. • In (B) XOS is placed before binocular summation. In this case, cross-oriented monocular effects could be either greater than or less than the corresponding dichoptic effects. Intermediate outcomes are possible with hybrids of these arrangements (not shown). • RESULTS: Baker et al (2007) found a complex set of results that were consistent only with model (B). Meese & Hess (2004) and Meese & Baker (2009) also came to this conclusion. • You should now read: Baker, Meese & Summers (2007). Left horizontal Right horizontal (A) Suppression from left horizontal (B) Left vertical Left vertical S Gain control S Gain control output output Right vertical Right vertical Gain control Suppression from right horizontal Binocular contrast gain control Monocular contrast gain control Right horizontal Left horizontal
What about the physiology? • There are some close similarities between the psychophysics (in human) and the physiology (mainly in cat). There are two key single-cell studies involving very similar experiments and findings (Sengpiel and Vorobyov, 2005; and Li et al, 2005). • Recorded from area 17 in cat (V1) different results were found when the cross-oriented mask was presented to the same (monoptic) or different (dichoptic) eye from the test grating. • Monoptic XOS was very broadly tuned to spatial and temporal frequency, extending to temporal frequencies that are higher than those that produce a cortical response. Monoptic XOS was not diminished by adapting to the mask orientation. • Dichoptic XOS was less effective at high temporal frequencies. And its effects were diminished by adapting to the mask orientation. • These results suggest that monoptic XOS is subcortical (where cells respond to higher temporal frequencies) and that dichoptic XOS is cortical (where cells are prone to contrast adaptation) • You should now read Li et al (2005) (or Sengpiel and Vorobyov, 2005)
Clinical implications(Contrast detection in amblyopia) • It is well known that binocular vision and stereopsis is compromised in strabismic amblyopia (see Levi & Li (2009) for a recent review). • It is sometimes claimed that these observers have little or no binocular summation of contrast. From this it has been implied that these observers do not have binocular contrast mechanisms. • However, those studies usually find that contrast sensitivity is much worse in the amblyopic eye. Therefore, it is hardly surprising that performance for monocular and equal-contrast binocular gratings is similar. • Baker, Meese, Mansouri & Hess (2007) increased the contrast in the amblyopic eye so that horizontal gratings in each eye were equally detectable when presented alone. Using this technique they found that BinSR~sqrt(2), slightly less than in normal observers but sufficiently potent to indicate that binocular mechanisms remain intact. • The implications of this result for the treatment of strabismus are not yet fully assessed. For example, it is possible that the spared binocular function is limited to horizontal contours.
Clinical implications(Interocular suppression and amblyopia) • Baker, Meese & Hess (2008) performed the binocular masking experiments of Meese, Georgeson & Baker (2006) on strabismic amblyopes. • Broadly speaking, the main findings were these: • A complex set of masking functions was found for the amblyopes. • These results were replicated in a normal observer by placing a neutral density filter in front of one eye. • The ‘two-stage’ model was lesioned in a variety of ways and compared to the experimental data. The most effective lesion was contrast attenuation and injection of noise in the amblyopic eye. This accounted for amblyopic suppression while leaving binocular summation intact. • You should now read Baker, Meese & Hess (2008)
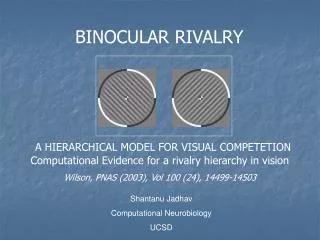
ADDENDUM • Binocular rivalry
Binocular rivalry • As any literature search will show, binocular rivalry has attracted a great deal of research interest over recent years. In the next slide, we restrict our consideration to just a few comments. • The basic phenomenon can seen by free fusing the two images below (Diaz-Caneja, 1928, translated by Alais et al, 2000), using the cross-hairs to help with alignment. • You should notice that the percept is very unstable, with different regions competing for perceptual dominance. Sometimes the left eye dominates, sometimes the right, sometimes the red stripes, sometimes the green circles, and sometimes fragments of each.
Binocular rivalry • The main controversy in recent years has been over whether rivalry is driven by competition between the eyes (e.g. Lee & Blake, 2004) or competition between the different images (e.g. Kovacs et al, 1996). • The situation is still not clearly resolved, it is plausible that both routes are involved. • Certainly, detailed eye-based computational accounts have enjoyed success with experimental data (e.g. Wilson, 2003) and fMRI indicates that V1 is involved (Lee, Blake & Heeger, 2007). • Furthermore, the interocular suppressive pathways identified in this lecture offer a plausible route by which rivalry might take place. • For example, the main differences between rivalry and interocular masking are: • In rivalry, both images are high contrast but in masking, one of them is usually at detection threshold. • In rivalry, the stimuli are presented for long periods of time whereas in masking, stimulus duration is usually in the order of a few hundred milliseconds. • In rivalry, the dominant percept fluctuates whereas in masking, the percept is usually stable. • It is possible that rivalry is a manifestation of the same process as interocular suppression but at a later stage in its time-course (Sengpiel et al, 1995; Baker et al, 2007; Baker & Graf, 2009).
Epilogue • Our understanding of binocular interactions has improved considerably over the last decade, but numerous questions remain: • How can these ideas, based on grating contrast and performance measures, be extended to feature-based models that describe the way that things look (e.g. MAG2)? • How can these ideas be extended to models of stereopsis? • What is the manifold for visual decision making? For example, the ‘two-stage’ model has just a binocular output, but are monocular outputs also available to the normal observer?