Download

1 / 53
580 likes | 886 Views
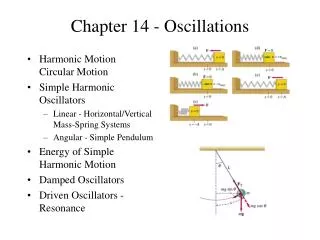
Chapter 17 Oscillations. 17-1 Oscillating Systems. Each day we encounter many kinds of oscillatory motion, such as swinging pendulum of a clock , a person bouncing on a trampoline, a vibrating guitar string , and a mass on a spring . They have common properties:

E N D
17-1 Oscillating Systems Each day we encounter many kinds of oscillatory motion,such as swinging pendulum of a clock, a person bouncing on a trampoline,a vibrating guitar string, and a mass on a spring. They have common properties: • The particle oscillates back and forth about a equilibrium position. The time necessary for one complete cycle (a complete repetition of the motion) is called the period T.
2. No matter what the direction of the displacement, the force always acts in a direction to restore the system to its equilibrium position. Such a force is called a “restoring force(恢复力)”. 3. The number of cycles per unit time is called the “frequency” f. (17-1) Unit: period (s) frequency(Hz, SI unit), 1 Hz = 1 cycle/s 4. The magnitude of the maximum displacement from equilibrium is called the amplitude of the motion.
17-2/3 The simple harmonic oscillator and its motion 1. Simple harmonic motion An oscillating system which can be described in terms of sine and cosine functions is called a “simple harmonic oscillator” and its motion is called “simple harmonic motion”. 2. Equation of motion of the simple harmonic oscillator Fig 17-5 shows a simple harmonic oscillator, consisting of a spring of force constant K acting on
Fig 17-5 origin is chosen at here a body of mass m that slides on a frictionless horizontal surface. The body moves in x direction. m Relaxed state x o F m x o (17-4)
Eq(17-4) is called the “equation of motion of the simple harmonic oscillator”. It is the basis of many complex oscillator problems. Rewrite Eq(17-4) as (17-5) We write a tentative solution to Eq(17-5) as (17-6) 3. Find the solution of Eq. (17-4)
We differentiate Eq(17-6) twice with respect to the Time. Putting this into Eq(17-5) we obtain Therefore, if we choose the constant such that (17-7) Eq(17-6) is in fact a solution of the equation of motion of a simple harmonic oscillator.
a) : If we increase the time by in Eq(17-6), then Therefore is the period of the motion T. (17-8) (17-9) The quantity is called the angular frequency.
b) : is the maximum value of displacement. We call it the amplitude of the motion. • and : The quantity is called phase of the motion. is called “phase constant (常相位)”. and are determined by the initial position and velocity of the particle. is determined by the system.
图 How to understand ?
反相 How to compare the phases of two SHOs with same ? 超前 落后 为其它 同相
Fig 17-6 shows several simple harmonic motions. Fig 17-6 (a) (b) (c) (a) same: , different: (b) same: , different: (c) same: , different:
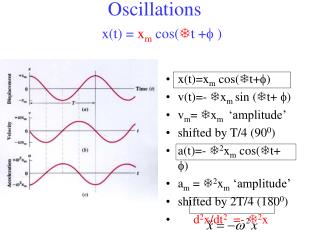
d).Displacement, velocity, and acceleration Displacement Velocity Acceleration When the displacement is a maximum in either direction, the speed is zero, because the velocity must now change its direction. (17-11)
取 图 图 图
17-4 Energy in simple harmonic motion 1.The potential energy (17-12) 2.The kinetic energy U(t) K(t) T/2 T (17-13) Fig 17-8(a)
Fig17-8(a), both potential and kinetic energies oscillate with time tand vary between zero and maximum value of . • BothU and K vary with twice the frequency of the displacement and velocity. 3. The total mechanical energy E is (17-14) E U(x) K(x) x Fig 17-8 (b)
At the maximum displacement , . At the equilibrium position , . Eq(17-14) can be written quite generally as (17-15) then (17-16) or
Sample problem 17-2 Fig 17-5 x m o In Fig 17-5, m=2.43kg, k=221N/m, the block is stretched in the positive x direction a distance of 11.6 cm from equilibrium and released. Take time t=0 when the block is released, the horizontal surface is frictionless. (a) What is the total energy? (b) What is the maximum speed of the block? (c) What is the maximum acceleration? (d) What is the position, velocity, and acceleration at t=0.215s?
Solution: (a) (b) (c) The maximum acceleration occurs just at the instant of release, when the force is greatest (d)
Since at t=0, then So at t=0.215s
Sample problem 17-3 Fig 17-5 v m x 0 In Fig17-5, m=2.43kg, k=221N/m, when the block m is pushed from equilibrium to x=0.0624m, and its velocity , the external force is removed and the block begins to oscillate on the horizontal frictionless surface. Write an equation for x (t) during the oscillation.
Solution: : Setting this equal to , we have To find the phase constant , we still need to use the information give for t=0: At t=0
★(1) 图 So only will give the correct initial velocity.
★(2) Or for for is correct.
17-5 Applications of simple harmonic motion Fixed clamp O’ 1. The torsional oscillator(扭转振子) Fig 17-9 shows a torsional oscillator. If the disk is rotated in the horizontal (xy) plane, the reference line op will move to the OQ, and the wire oo’ will be twisted. The twisted wire will exert a restoring torque on the disk, tending to return the system to its equilibrium. o Q p R Fig 17-9
For small twist, the restoring torque is (17-17) Here is constant ( the Greek letter Kappa ), and is called torsional constant. The equation of motion for such a system is (17-18) where is the rotational inertia of the disk about z axis. Using Eq(17-17) we have
or (17-19) Eq(17-19) and (17-5) are mathematically identical. The solution should be a simple harmonic oscillation in the angle coordinate , (17-20) or (17-21) A torsional oscillator is also called torsional pendulum(扭摆). The Cavendish balance, used to measure the gravitational force constant G, is a torsional pendulum.
2. The simple pendulum(单摆) Fig(17-10) shows a simple pendulum of length L and particle mass m. The restoring force is: (17-22) If the is small, T L k m (17-23) x mg (17-24) k Fig(17-10)
3. The physical pendulum(复摆) • Any rigid body mounted so that it can swing in • vertical plane about some axis passing through it • is called “physical pendulum”. In Fig. 17-11 a body of irregular shape is pivoted about a horizontal frictionless axis through P P d C y x Mg Fig(17-11)
The restoring torque for an angular displacement is (17-26) For small angular displacement . (17-27) then (17-28) (a)The rotational inertia can be found from Eq(17-28). (17-29)
(b) Center of oscillation (振动中心 )” Suppose the mass of the physical pendulum were concentrated at one point with distance L from the pivot, it will form a simple pendulum. P d L (17-30) C The resulting simple pendulum would have same period as the original physical pendulum. O Fig(17-11)
P P d L C C O O Fig(17-11) The point O is called the “center of oscillation” of the physical pendulum. • If we pivot the original physical pendulum from point O, it will have the same period as it does when pivoted from point P. • The center of oscillation is often also called the “center of percussion(撞击中心)”. If an impulsive force in the plane of oscillation acts at the center of oscillation, no effect of this force is felt at the pivot point P.
Sample problem 17-4 A thin uniform rod of mass M=0.112kg and length L=0.096m is suspended by a wire that passes through its center and is perpendicular to its length. The wire is twisted and the rod set oscillating. The period is found to be 2.14s. When a flat body in the shape of an equilateral triangle is suspended similarly through its center of mass, the period is found to be 5.83m. Find the rotational inertia of the triangle about this axis.
Solution: The rotational inertia about its Cm is from Eq(17-21) or
A uniform disk is pivoted at its rim ( Fig17-12). Find its period for small oscillations and the length of the equivalent simple pendulum. Solution: The rotational inertia about pivot at the rim is Sample problem 17-5 P R C O Fig 17-12
From Eq(17-28) with d=R, then The simple pendulum having the same period has a length (Eq(17-30)) The center of oscillation of the disk pivoted at P is therefore at o, a distance below the point of support. You may check that the period of the pendulum pivoted at O is the same as that pivoted at P.
Torsional Pendulum (扭摆) Torsional pendulum clock
17-6 Simple harmonic motion and uniform circular motion Simple harmonic motion can be described as a projection of uniform circular motion along a diameter of the circle. 1. Fig17-14 shows a particle P in uniform circular motion. y P Q r 0 x Fig 17-14
At a time t, the vector ( ) makes an angle with x axis, and the x component of is (17-31) This is of course identical to Eq(17-6) for the displacement of the simple harmonic oscillator. • The radius r corresponding to ; • Point , which is the projection of P on the x axis, executes simple harmonic motion along the x axis.
2. The magnitude of the tangent velocity of the point P is , the x component of is (17-32) 3. The centripetal acceleration is , and its x component is (17-33) Eqs(17-32) and (17-33) are identical with Eqs(17- 11) for simple harmonic motion, again with replace by r. See动画库\波动与光学夹\1-07辅助圆
4. In Fig17-14,the y projection OQ of at time t, is (17-34) So the projection of uniform circular motion along the y direction also gives simple harmonic motion. On the contrary, the combination of two simple harmonic motions at right angles, with identical amplitude and frequencies, can form a uniform circular motion. See动画库\波动与光学夹\1-10垂直振动的合成
17-7 Damped (阻尼) harmonic motion v Up to this point we have assumed that no frictional force act on the system. For real oscillator, there may be friction, air resistance act on the system, the amplitude will decrease. 1. This loss in amplitude is called “damping” and the motion is called “damped harmonic motion”. m x f 0
Fig17-16 compare the motion of undamped and damped oscillators. x t (a) x (b) t Fig 17-16
When we add a small damping force, the amplitude gradually decreases to zero but the frequency changes by a negligible amount. In this case Eq(17-6) becomes (17-36) where is called the “damping time constant” or the “mean lifetime” of the oscillator. is the time necessary for the amplitude to drop to 1/e of its initial value.
(b) When the damping force is not large, the mechanism energy is (17-37) Eq(17-37) shows that the mechanical energy of the oscillator decreases exponentially with time. The energy decreases twice as rapidly as the amplitude.
2*. Mathematical analysis Assume the damping force is , where b is a positive constant called the “damping constant”. With , Newton’s second law gives or (17-38)
The solution is (17-39) where (17-40) • If b is negligible, . It is ideal simple harmonic oscillation. If , that is , damping slows down the motion. This case is called underdamping (欠阻尼) Comparing Eqs(17-39) and (17-36) we have
三种阻尼的比较 (c) (a) (b) When , , the motion decays exponentially to zero with no oscillation at all. This condition is called “critical damping (临界阻尼)”. The lifetime has its smallest possible value, . (c) When , the motion also decays exponentially to zero with no oscillation, called overdamping (过阻尼).
17-8 Forced oscillations and resonance Forced oscillations: Oscillations of a system carried out under the action of an external periodical force, such as or a successive action of an external non-periodical force. and , ,Which frequency will the forced oscillation system take? Forced oscillation system takes the frequency of the external force, namely .
Resonance: The amplitude of the forced oscillation can increase much as approaches . This condition is known as “resonance” and is called “resonant angular frequency”.