DC Brushed Motors
DC Brushed Motors. 2009. FRC Kick-off Workshops Ken Stafford. The Basics…. Imperfect Transducers Electrical Power to Mechanical Power Electrical Power to Thermal Power! Electrical Power (input) Volts times Amps (Watts) EG: CIM @ 40A has 480W input @12V Mechanical Power (output)

DC Brushed Motors
E N D
Presentation Transcript
DC Brushed Motors 2009 FRC Kick-off Workshops Ken Stafford
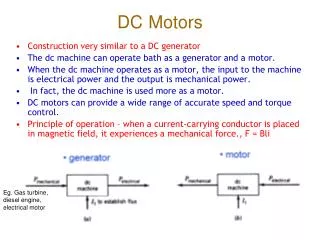
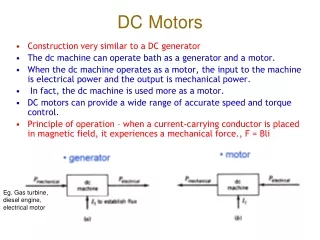
The Basics… • Imperfect Transducers • Electrical Power to Mechanical Power • Electrical Power to Thermal Power! • Electrical Power (input) • Volts times Amps (Watts) • EG: CIM @ 40A has 480W input @12V • Mechanical Power (output) • RPM times Torque (Watts/Hp) • EG: CIM (40A/12V) 3800rpm/6.15 inlbs=275W
The more basic Basics… • Torque “twisting effort” • EG: shaft turning, force at the end of an arm, force at the circumference of wheel… “pushing/pulling strength” • Unlimited torque available through any motor with appropriate transmission • Power “rate of doing work” • EG: speed of lifting, torque times rpm, force times distance… “robot/mechanism speed” • Maximum is set by motor design—only decreases through transmission
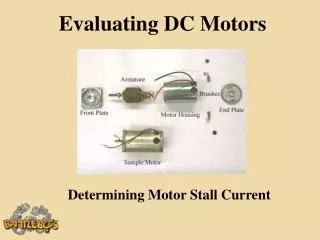
Different Manufacturers provide varying data Not too difficult to obtain experimentally with basic lab equipment You need only four values to predict ideal performance At full speed (no load) Motor Speed (rpm) Current Draw At maximum torque (stall) Torque Current Draw Motor Parameters
Example: 2008 Taigene (Van Door) • Motor clamped in vise hooked to calibrated power supply • Free-running rpm by timed counting • Stall torque by linear force balance at end of measured arm • Current measured directly from power supply • Results: • Free running: 47.5 rpm @ 1.23 A • Stall: 360 in lbs @ 24.2 A
So…what does this mean? • Max Torque occurs at zero rpm (stall) • Also produces zero Mech Power and Max Thermal Power • Lightweight, air-cooled motors will smoke in seconds
More… • Max Power occurs at 50% Stall Torque, ~ 50% Stall Current, and 50% Free-running speed • Any sub-maximum power is available at 2 different operating conditions • High speed/low torque • Low speed/high torque • Max Efficiency occurs at ~25% Stall Torque or ~60% Max Power
Recent FRC Motors • Sealed vs Air-Cooled • Thermal Protection • Anti-backdrive vs backdrive resistant • Built in transmissions
Selection Criterion • Power Requirement • Weight of Motor & Transmission • Physical Size of Motor & Transmission • Backdrive Characteristics • Continuous vs Intermittent Operations • Efficiency • Availability
Specific Recommendations • Big and Little CIMs: • High power, can handle intermittent high loads, very heavy • Application: • Driveline, or high power accessories located low in the chassis • To avoid overheating, rule of thumb says that you should be geared sufficiently low enough to spin your wheels when blocked
Recommendations Cont. • Fisher-Price/BaneBots • Very high power/low weight/ intolerant of high load • Applications: • Shooters/fans
Recommendation Cont. • Van Door • Mid power, thermal protection, backdrive resistant, heavy • Applications: • Arm shoulder, turret • Low in chassis
Recommendations Cont. • Globe • Small size, integral transmission, thermal protection • Applications: • Wrist joint, end effectors, high on chassis
Recommendations Cont. • Window Motors • Low power, anti-backdrive, thermal protection, heavy • Applications: • Nothing else left, gates, low powered arms/ accessories
Design Details • EG: Build a winch using the Taigene to lift a 50 lb weight 3 ft in 5 seconds: • Power = ((50 lb)(3 ft)/5 sec)(746 W/550 ft-lb/sec) = 40W • It produces 40 W at either 100 or 275 in-lb • At 100 in-lbs it’s ~45% efficient; at 275, it’s ~18%! • Design your drum radius so it develops 50 lbs of force with 100 in-lbs of torque • Radius = 100in-lbs/50 lbs = 2 in
Design Details Cont. • If holding a lifter in position is important do not relay upon motor torque (overheating) • Design a mechanical one-way clutch or retractable ratchet
Overall Caveats • Real world motors in robots will not operate at the peak values predicted on the performance maps • Batteries will sag, voltage will be lost through conductors, etc • You need to consider mechanical transmission efficiency when calculating motor requirements • Be careful to note reference voltage in manufacture’s data—automotive use 10.5V commonly
General Suggestions • Operate motor on left side of performance map • Air-cooled motors cannot operate near stall for more than a few seconds • Control top speed of operation by suitable gearing not by reduced voltage • Avoid powered anti-backdrive