Download
1 / 25
250 likes | 457 Views
Constructing Convex 3-Polytopes From Two Triangulations of a Polygon. Benjamin Marlin Dept. of Mathematics & Statistics McGill University. Godfried Toussaint School of Computer Science McGill University. Introduction. A configuration (P,T 1 ,T 2 ):.

E N D
Constructing Convex 3-Polytopes From Two Triangulations of a Polygon Benjamin MarlinDept. of Mathematics & StatisticsMcGill University Godfried ToussaintSchool of Computer ScienceMcGill University
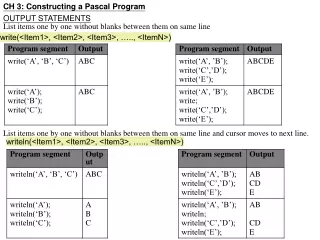
Introduction A configuration (P,T1,T2): • A strictly convex polygon P = (V, E) in the XY-plane. • A set of diagonals T1 which triangulates P. • A set of diagonals T2 which traingulates P and shares no diagonals with the set T1. Example: P P with T1 P with T2
Introduction Constructing Convex 3-Polytopes: Given a configuration (P,T1,T2), we are interested in transforming it into a convex 3-polytope P* by mapping the vertices of P into 3-space. Unrestricted Mapping: v=(x,y) v’=(x’,y’,z’) For each vertex in the configuration new x, y and z-coordinates are assigned. Restricted Mapping: v=(x,y) v’=(x,y,z’) For each vertex in the configuration the x and y-coordinates are preserved, and a new z-coordinate is assigned.
Introduction Edge Mapping: e=(v1,v2) e’=(v1’, v2’) • We consider edges and diagonals to be straight line segments joining two distinct verticies. • When a configuration is mapped into 3-space we first assign each vertex to its new position, and then add edges between any two vertices that were connected by an edge or a diagonal in the starting configuration.
A=(0,3,3) B=(4,0,0) D=(-4,0,0) C=(0,-3,0) Introduction A Realization Example: A Configuration (P,T1,T2) is realized as a convex 3-polytope P* by raising vertex A out of the plane by 3 units. The complete mapping can be seen below. Configuration (P,T1,T2) Convex 3-Polytope P* A=(0,3) D=(-4,0) B=(4,0) C=(0,-3)
Overview: Unrestricted Mapping: • We will show that any configuration can be mapped into a convex 3-polytope if there are no restrictions on the placement of the vertices in 3-space. • The proof of this statement involves the use of graph theory, particularly the theory of polyhedral graphs developed by Steinitz. Steinitz’s Theorem: A graph G is isomorphic to the edge graph of a convex 3-polytope P* if and only if G is planar and 3-connected.
Overview: Restricted Mapping: • Leo Guibas conjectured that every configuration could be realized as convex 3-polytope if the verticies of the configuration were allowed to vary vertically only. Boris Dekster later proved this conjecture false. We will present an adaptation of Dekster’s Proof. • Many configurations are realizable under the restricted mapping. In the final section we present a complete chrarcterization of the realizable configurations, as well as an alogorithm for deciding the realizabiltiy of a configuration based on linear programming techniques.
Unrestricted Mapping Theorem 1: Given a strictly convex polygon P in the XY-plane along with two triangulations of it T1 and T2, it is always possible to assign new x, y and z coordinates to the vertices of P such that the resulting 3-polytope P* is convex. Lemma 1: The edge graph G of (P U T1 U T2) is planar. • Let G1 be the edge graph of (P U T1) and G2 be the edge graph of (P U T2) . • G1 and G2 are both plane graphs because by definition a triangulation of a convex polygon has no crossing edges.
Unrestricted Mapping Lemma 1 (Continued): • Since G1 and G2 are plane graphs, each can be embeded on the surface of a sphere with the vertices along the equator and edges as noncrossing arcs of great circles restricted to one hemisphere. • But then G= (G1 U G2) can be mapped to the surface of a sphere with G1 in one hemisphere and G2 in the other. • Taking a steriographic projection onto the xy-plane we obtain an embedding of G with no edge crossings so G must be a planar graph.
Unrestricted Mapping Lemma 2: The graph G of (P U T1 U T2) is 3-connected. • If P has n vertices (PUT1UT2) has a total of 3n-6 edges . • Every planar graph with 3n-6 edges is a maximal planar graph (Whitney). • All maximal planar graphs with n 4 are 3-connected (Kuratowski). Proof of Theorem 1: • By Lemma 1, Lemma 2, and Steinitz’s Theorem, the edge graph G of (P U T1 U T2) is realizable as a convex 3-Polytope P*. • If P* is a realization of G, then P* is a realization of (P U T1 U T2) under the unrestricted mapping.
Restricted Mapping: Guibas’ Conjecture Historical Aspects: • Proposed by Leo Guibas at the first CCCG held at McGill University in August 1989. • Proved false by Boris Dekster of Mount Allison University in 1995. Guibas’ Conjecture: Given a configuration (P,T1,T2) is it always possible to assign height values to the vertices of P such that the edges of the convex hull of the spatial polygon P’ project back onto (P U T1 U T2).
Dekster’s Counter Example Dekster proves a general necessary condition for realizability on the configuration (P,T1,T2). He then produces a counter example for which the condition fails, showing that Guibas’ conjecture is false. The counter example is shown below:
Dekster’s Counter Example Direct Proof Sketch: • Assume that the counter example configuration has an assignment of heights that satisfies Guibas’ conjecture. • Proceed by geometric argument to show that there exist two points y1 and y2 where both y1 is strictly above y2, and y2 is strictly above y1 for any height assignment. • Conclude by contradiction that Guibas’ Conjecture must be false.
Deciding Realizability Overview: • Based on the characterization that a polyhedron is convex if and only if for each face, all the remaining vertices are on the same side of that face. • Uses the signed volume of the simplex formed by each face and each of the remaining remaining vertices to construct a set of linear inequalities. • Applies linear programming techniques to determine if a solution to the system exists.
Deciding Realizability Motivation: • As we have seen, the unrestricted mapping provides a link between Guibas’ conjecture, and Steinitz’s theorem. • The reduction to linear inequalities is inspired in part by similar methods used in quantitative treatments of Steinitz’s Theorem (Onn and Sturmfels). • A reduction to a system of linear equalities and inequalities is also used by Sugihara to characterize realizable line drawings, a related problem.
Deciding Realizability Constructing the Inequalities: Let fi=(vi,1, vi,2,vi,3) be a face of P oriented counter clockwise if fi is a face of the top of P, and clockwise if fi is a face of the bottom of P. Let vj be a vertex of P- fi. For the signed volume to be positive we require that:
Deciding Realizability Key Observation: The inequalities are linear in the Z coordinate since the X and Y coordinates are given in the problem instance. Cofactor expansion of the determinant along the Z column gives a linear inequality in Z:
Deciding Realizability Theorem: A configuration (P,T1,T2) is realizable as a convex 3-polytope if and only if the set of linear inequalities just described has a solution. Proof: • If the set of inequalities has a solution (z1, z2, ..., zn),then when these values are assigned to P, the resulting 3-polytope will be convex. • If the set of inequalities has no solution, then for any assignment of values to the zj’s at least one of the inequalities isn't satisfied. This means at least one vertex is on the wrong side of a face, and P is not realizable.
Deciding Realizability Algorithm: 1. Given a configuration (P,T1,T2) compute its combinatorial graph G. 2. Compute the set of faces F of G with vertices listed in the appropriate order with respect to top/bottom. 3. Compute the set of linear inequalities as described. 4. Apply linear programming techniques to determine if the set of linear inequalities has a solution. 5. If a solution exists the configuration is realizable, otherwise it is not realizable. Note: To compute a realization we return any solution found by the LP method, if a solution exists.
Computational Complexity • A configuration (P,T1,T2) with n vertices generates an n dimensional linear programming instance with at most n(n-3) inequalities. • The complexity of the proposed method is dominated by the complexity of the specific linear programming algorithm used to solve the system of linear inequalities.
Directions for Further Study • Determining which linear programming method gives the best results for the systems of inequalities produced (n dimensions, O(n2) inequalities, 4 variables per inequality). • Finding a set of inequalities of size O(n) to replace the O(n2) set of inequalities described here. One possibility is to use a dihedral angle test for local convexity at each edge (suggested by Anna Lubiw).