Download
1 / 16
160 likes | 178 Views
Beam-forming and matched filter techniques for the underwater acoustic detection of UHE neutrino. (Francesco Simeone INFN Roma). Why using neutrinos?. High energy proton (50 Mpc). Astrophysical source. Neutrinos. High energy photon (10 Mpc). Low energy proton (deflected).

E N D
Beam-forming and matched filter techniques for the underwater acoustic detection of UHE neutrino (Francesco Simeone INFN Roma) ARENA08 Roma 25-27 June 2008 Francesco Simeone (francesco.simeone@roma1.infn.it)
Why using neutrinos? High energy proton (50 Mpc) Astrophysical source Neutrinos High energy photon (10 Mpc) Low energy proton (deflected) ARENA08 Roma 25-27 June 2008 Francesco Simeone (francesco.simeone@roma1.infn.it)
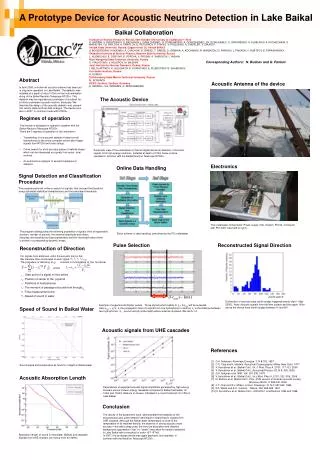
Neutrinos interaction and signal generation Input : Energy density (UHE Particle showers) Production: thermodynamic parameters (T,S) Propagation : sound velocity and density (T,S) Output : Pressure (signal) R =1 km E= 5 ·1020eV Vandenbroucke et al.,2004 The hydro-acoustic technique is under study to detect >PeV neutrinos. The technique is based on the detection of acoustic waves produced by energy dissipation, in water, following a UHE neutrino induced shower. Due to long absorption length of sound in water (1-10 km) large volumes can be observed using a small number of detectors deployed in a huge volume of water (>10 km3). ARENA08 Roma 25-27 June 2008 Francesco Simeone (francesco.simeone@roma1.infn.it)
Ambient noise The knowledge of ambient noise at large depth as a function of time is poorly known. One of the best resources for this kind of information is the data set acquired by ONDE. (NEMO-ONDE : a submarine station for real-time monitoring of acoustic background installed at 2000 m depth in the Mediterranean Sea) The maximum of PSD of the expected signal is expected in the 10-30 kHz band. In this range most of the diffuse noise is due to surface agitation (sea state), loud impuslive signals are expected by biological sources ARENA08 Roma 25-27 June 2008 Francesco Simeone (francesco.simeone@roma1.infn.it)
Noise spectrum measured by ONDE Average SPD measured at 2000 m depth with OnDE compared with bibliographic data (shallow depth). The monthly variability is of the order of 10 uPa2/Hz. If we integrate the PSD in frequency region of interest we obtain an average noise level of tens of mPa. ARENA08 Roma 25-27 June 2008 Francesco Simeone (francesco.simeone@roma1.infn.it)
Analysis strategy • The expected neutrino signal, even at UHE, is comparable with the ambient noise. It’s necessary to detect signals even smaller. This can be obtained combining two strategies: • Analize data from a single hydrophone to obtain the maximun signal to noise ratio.(Matched filter) • Analize data from an array of hydrophones to reject ambient noise.(Beamforming) ARENA08 Roma 25-27 June 2008 Francesco Simeone (francesco.simeone@roma1.infn.it)
Matched filter part I S(t) X(t) Matched filter Y(t) N(t) The matched filter is the optimal linear filter to maximize the signal to noise ratio (SNR) in presence of additive stochastic noise. Its transfer function is the complex coniugate of the spectrum of the signal to which it is matched. A typical matched filter application is shown: In this sample the SNR is about -3.5dB. ARENA08 Roma 25-27 June 2008 Francesco Simeone (francesco.simeone@roma1.infn.it)
Matched filter part II In case of not-white noise the common approach is to weight the matched filter with the noise spectral density. One can convince himself of this intuitively in the following manner: Matched filter for non white(but known) noise Filter with transfer function 1/ N(i*2πf) Input signal(with spectrum S(i2πf)) plus non white noise of known power density spectrum |N(i2πf)|2 The noise component at this stage will be white; however, the signal componet will be distorted with spectrum S(i2πf) / N(i2πf) This filter must match the distorted signal so its transfer function will be the original(white one) divided by |N(i2πf)|2 If the noise spectrum is known there is no loss of performance. ARENA08 Roma 25-27 June 2008 Francesco Simeone (francesco.simeone@roma1.infn.it)
Matched filter part III Performance results for the applied matched filter in presence of white noise. Time window simulated 1ms Number of windows 1000. Signal sampled at 1MS/s ARENA08 Roma 25-27 June 2008 Francesco Simeone (francesco.simeone@roma1.infn.it)
Beamforming The beamforming is a technique used to analize an array of sensors to provide a versatile form of spatial filtering. In its simplest form the beamforming is a multi input single output algorithm implemented as “delay and sum” . Using the correct delays, signals from different sensors are summed coherently. ARENA08 Roma 25-27 June 2008 Francesco Simeone (francesco.simeone@roma1.infn.it)
Analysis set-up Direction of arrival The delay are calculated using wave plane approximation. Time of arrival Match Filter Beamforming Hydrophone calibration Threshold V Pa … The threshold is function of the noise level. This means that this algorithm must be adaptive. Match Filter Hydrophone calibration ARENA08 Roma 25-27 June 2008 Francesco Simeone (francesco.simeone@roma1.infn.it)
Test geometry ARENA08 Roma 25-27 June 2008 Francesco Simeone (francesco.simeone@roma1.infn.it)
Beamforming plus matched filter performance SNR=-3.5dB SNR=-6dB SNR=-9.5dB SNR=-12dB SNR=0dB The beamforming can, in principle, increase the SNR by a factor equal to the square root of the hydrophones number. ARENA08 Roma 25-27 June 2008 Francesco Simeone (francesco.simeone@roma1.infn.it)
How to use the beamforming? • The beamforming can be used with any number of hydrophones at any distant. • The only requirements is the ability to correlate the signals of different hydrophones. • If we try to correlate “near” hydrophones we need to assume one direction of arrival of a plane wave (two free parameters). • If we want to correlate “distant” hydrophones we need a propagation model for underwater sound. In the approximation of constant sound gradient we need to assume the shower position and its orientation (5 free parameters). ARENA08 Roma 25-27 June 2008 Francesco Simeone (francesco.simeone@roma1.infn.it)
Computational power • This set-up is very expensive in terms of computational power: • Each matched filter requires, for each samples, a number of additions(add) and multiplications(mul) equal to the signal length (in samples). For instance applying the matched filter to an hydrophone sampled at 200kHz requires 2Madd/s and 2Mmul/s. • To build the beamforming output, for each samples, a number of add equals to the number of hydrophones minus one are required. For instance if the number of hydrophones is 4 and the sampling rate is 200kHz we require 600kadd/s for each set of delays. ARENA08 Roma 25-27 June 2008 Francesco Simeone (francesco.simeone@roma1.infn.it)
Conclusion • The matched filter give the best results that can be obtained by a linear filter on a single channel. • The beam-forming is the only way to further increase the SNR. • It can be used on near hydophone to recover the direction of incident sound waves. • It needs an underwater sound propagation model if we want to apply it on distant hydrophones. • It needs a lots of computational power. ARENA08 Roma 25-27 June 2008 Francesco Simeone (francesco.simeone@roma1.infn.it)