Robust Control of Uncertain MIMO Systems: Design and Assessment Techniques
This lecture focuses on the challenges of controlling uncertain MIMO (Multiple Input Multiple Output) systems, featuring design strategies to achieve robust stability and performance. Key topics include the representation of uncertainty (both unstructured and structured), robust stability assessments, and control design methods like decentralized inverse-based control and H-infinity synthesis. Practical considerations include ensuring minimal steady-state error for step references, rapid rise times, and minimal overshoot. The session provides insights into the selection of weights and methodologies for robust performance evaluation.

Robust Control of Uncertain MIMO Systems: Design and Assessment Techniques
E N D
Presentation Transcript
Multivariable Control SystemsECSE 6460 Fall 2009 Lecture 26: 4 December 2009
Uncertain MIMO Plant Gp(s)
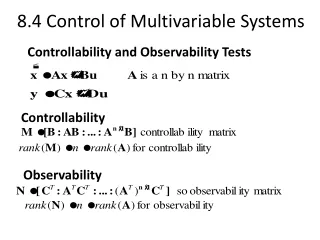
Feedback Control Loop K(s) Gp(s) + - • practically zero steady state error for step reference • rise time less than 1 second • overshoot less than 5% • robustly for any value of c
Menu for the day • Representing the uncertainty • a la unstructured uncertainty • a la structured uncertainty • Assessment of robust stability • a la unstructured uncertainty • a la structured uncertainty • Assessment of robust stability • a la unstructured uncertainty • a la structured uncertainty
Unstructured Uncertainty Wo(s) D(s) Output uncertainty + G(s) + Wi(s) D(s) Input uncertainty + + G(s)
Output Uncertainty Wo(s) D(s) Output uncertainty + G(s) + We need to select a weight such that:
Input Uncertainty Wi(s) D(s) Input uncertainty + + G(s) We need to select a weight such that:
Weight Wo(s) Refer to uncert1.m
Structured Uncertainty Ws(s) D relax to + G(s) +
Assessment of Robustness • In this topic, we first design a controller for the nominal system, then we assess the robustness properties of the system. • Two control designs are explored, decentralized inverse-based, and H-infinity synthesis. K(s) Gp(s) + -
Decentralized Inverse Based Based on nominal plant model Refer to decent.m
H synthesis for nominal plant • Use S/T synthesis with: Refer to hinf_ex.m
Robust Stability Assessment Unstructured Uncertainty Wo(s) D(s) + K(s) G(s) + + -
Robust Stability Assessment Wo(s) + K(s) G(s) + -
Robust Stability Assessment Refer to decent.m
Robust Stability Assessment Refer to hinf_ex.m
Robust Stability Assessment Structured Uncertainty Ws(s) D + K(s) + G(s) + -
Robust Stability Assessment Structured Uncertainty Ws(s) + K(s) + G(s) + -
Structured Singular Value Peak at 0.130 For decentralized controller
Structured Singular Value Peak at 0.150
Nominal Performance Refer to hinf_ex.m
Robust Performance Assessment Unstructured Uncertainty Wo(s) + + K(s) G(s) WP(s) + + -
Robust Performance Assessment Unstructured Uncertainty Wo(s) + + K(s) G(s) WP(s) + + -
Robust Performance Assessment Structured Uncertainty Ws(s) + + K(s) G(s) WP(s) + + -
Robust Performance Assessment Structured Uncertainty Ws(s) + + K(s) G(s) WP(s) + + -