4. Outdoor localization
4. Outdoor localization. 목 차. 1. Outdoor localization 기술 소개와 개발의 필요성 2.Outdoor localization 기술 2.1 GPS 2.2 Dead Reckoning 에 사용되는 센서 3. GPS 와 Dead Reckoning 을 이용한 통합 시스템 3.1 GPS 와 Dead Reckoning 을 이용한 통합 시스템 구성 3.2 GPS 와 INS 을 이용한 통합 시스템 구성.


4. Outdoor localization
E N D
Presentation Transcript
목 차 • 1. Outdoor localization 기술 소개와 개발의 필요성 • 2.Outdoor localization 기술 • 2.1 GPS • 2.2 Dead Reckoning에 사용되는 센서 • 3. GPS와 Dead Reckoning을 이용한 통합 시스템 • 3.1 GPS와 Dead Reckoning을 이용한 통합 시스템 구성 • 3.2 GPS와 INS을 이용한 통합 시스템 구성
1. Outdoor localization의 기술 소개와 개발의 필요성 • 장의 목표 • : 실외 위치 인식 기술의 중심인 GPS(Global Positioning System) 의 기술에 대해 학습하고 GPS의 오차를 보정할 수 있는 여러 가지 센서 기술과 센서의 종류 적용 방법에 대하여 학습.
2. Outdoor localization 기술 • Outdoor localization 기술 • 추측항법(Dead-Reckoning:DR)과 GPS (Global Positioning System) 기타 • 시스템 등 을 통합한 혼합항법시스템 (Hybrid Navigation System)으로 사용. 차량 항법 시스템 항공 항법 시스템
2. Outdoor localization 기술 • 2.1 G P S (Global Positioning System) • 지구 밖의 궤도에 있는 GPS 위성으로부터 정확한 자신의 위치 정보를 수신하여 • 위치 파악을 하는 시스템 • 미 국방성에서 자국 군의 위치를 파악하기 위해 제안되고 구축이 되었으며 • 시스템 구축 • 위성에서 보내주는 항법 메시지를 받아 수신기에서 위치를 계산
2. Outdoor localization 기술 우주 부분 • 모든 위성은 고도 20,200㎞ 상공에서 약 12시간을 주기로 지구 주위를 • 회전하며 궤도면은 지구의 적도면과 55°각을 이루고 있음 • 모두 6개의 궤도는 60°씩 떨어져 있고 1궤도면에는 4개의 위성이 위치 • 지구상 어느 지점에서나 동시에 5개에서 8개까지 위성 관찰이 가능
2. Outdoor localization 기술 관제 부분 • 주 관제국은 미국 콜로라도 스프링의 팰콘 공군기지에 위치 • 부 관제국들은 전 세계에 나뉘어져 배치 • 부 관제국들의 GPS 위성 신호를 저장한 다음 주 관제국으로 전송 함 • 부 관제국에서 보내온 자료는 주 관제국에서 위성에 있는 원자시계 • 오차를 추정하는데 사용되며, 그 결과를 주기적으로 GPS 위성으로 전송
2. Outdoor localization 기술 사용자 부분 • GPS수신기는 위성으로부터 수신 받은 신호를 처리하여 • 수신기의 위치, 속도와 시간을 계산 • 3차원 좌표와 시간이 합쳐져 4개의 미지수를 결정해야 하므로 • 4개 이상의 위성을 동시에 관측하여야 함
2. Outdoor localization 기술 2.1.1 GPS의 기본 원리
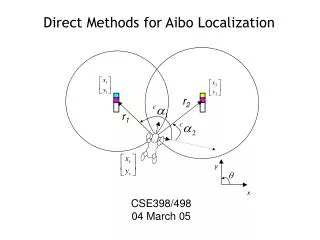
2. Outdoor localization 기술 모든 GPS의 위치는 위성과 수신기까지의 측정거리에 의하여 구하게 됨. 삼각측량법을 통해 거리를 측정하며, 수신된 위성신호에 대한 의사거리와 시간만으로 위치가 결졍됨. 신호의 도달 시간과 위치(위도, 경도, 고도)를 결정하기 위하여 4개의 미지수를 풀어야 하므로 4개의 위성에 대한 함수식이 있어야 함. 각 위성에서 발생시키는 신호의 출발시점과 수신점까지 시간 차이를 측정한 다음 여기에 빛의 속도를 곱하여 계산.
의사 거리는 C/A code 또는 P code를 이용하여 신호의 전송시간을 측정하고 이에 광속을 곱함으로써 위성까지의 거리 계산 2. Outdoor localization 기술 위성의 위치를 기준으로 수신기 위치를 결정하기 위해서는 위성의 정확한 위치를 알아야 함 ( 이를 위해서 GPS 위성으로부터 전송되는 궤도력을 사용) 4개의 위성으로부터 의사거리를 측정하면 함수식이 4개가 되어 위도(X), 경도(Y),고도(Z) 및 시간을 구할 수 있음.
2. Outdoor localization 기술 • 반송파(Carrier) • GPS 는 L 대역의 L1(1575.42 MHz), L2(1227.6 MHz)를 사용. • 위성에서 모두 똑 같은 주파수로 각자의 ID코드를 포함한 반송파 전송. • CDMA(Code Division Multi Access) • GPS 위성의 ID 는 Gold Code 라고 불리는 1023bit 의 0 과 1 의 조합으로 1.023Mbps 로 • 전송.
2. Outdoor localization 기술 • GPS의 반송파 위상 측정치: • 위성과의 의사거리:
2. Outdoor localization 기술 2.1.2 GPS의 신호 체계 • C/A Code • L1반송파에 담겨지는 Data. • Pseudo Random Noise (PRN) 1MHz 대역폭으로 위성의 고유 Code Number 포함. • C/A Code는 L1 반송파에변조되어일반SPS에게제공. • P-Code • P-Code(Precise)는 L1 과 L2에 모두변조되는 10㎒ PRN Code. • 특정한사람에게만쓰일 수 있게 Anti-Spoofing (AS) Mode로동작하기위해 • Y-Code로Encode되어전송. • Encode 된 Y-Code . PPS에게 제공.
2. Outdoor localization 기술 • Navigation Massage • 항법메세지는 위성의 위치를 수신기에 알려주는 역할을 함 • C/A Code와 함께 L1에 변조. • 전체 25개 프레임으로 구성 • : 프레임은 5개의 서브프레임으로 구성됨 • 1,2,3번 서브프레임(30초마다 반복) • : 시계오차를 보정하기위한 계수 • : Ephemeris • (위성력:해당위성의 정밀 궤도 데이터 ) • 4, 5번 서브프레임 • : Almanac • (모든위성에 대한 개략적인 궤도 데이터) • : 전리층 굴절오차 보상치(IONO)
2. Outdoor localization 기술 2.1.3 GPS의 오차 요인 • 위성의 시간/ 위치 오차 • 위성이 계산한 시간/위치와 실제 데이터가 달라 생기는 오차. • 시간 오차/ 위치 오차는 미 공군에의해 매 시간마다 보정. • 이온층/대류층/다중경로 오차 • 이온층(전리층)은 이온화 되어 전기적 성격을 • 지닌 입자(Ionized gas) 들이 전기적 성격 때문에 • 그 안에서 전파의 속도가 왜곡. • L1, L2 두 전파를 모두 받아 지연효과를 계산하면 • 이온층에 의한 오차 크기를 상쇄시킬 수 있음. • 대류층은대류층에 포함되어 있는 수증기가 • 그 주요 원인.
2. Outdoor localization 기술 • 위성 배치에 따른 기하학적 오차 • 육상에서 독도법으로 위성 위치를 파악할 때 적당한 간격의 기준을 선택하여 독도법을 실시하면 오차 삼각형이 적어져서 위치가 정확해지고, 한곳에 몰려있는 기준을 이용하는 경우 오차삼각형이 커져서 위치가 부정확해지는 원리.
2. Outdoor localization 기술 • 보이는 위성의 배치의 고른 정도를 DOP(Dilution of Precision) . • DOP 에는 여러 종류가 있지만 가장 많이 사용되는 것은 PDOP(Positional DOP)이며, GPS 수신기는 관측된 데이터를 이용하여 PDOP 를 계산. Range Error x PDOP = measurement error
2. Outdoor localization 기술 • 다중경로 오차 • 인공위성에서 바로 오는 신호가 아닌 • 반사되어 들어오는 신호를 받아들이는 • 오차 • 반사된 신호는 더 길어진 경로를 통해 • 인공위성에 들어옴으로 결과적으로 • 다른 위치를 측정하게 됨 • SA 오차 • 허가되지 않은 일반 사용자들이 GPS 신호를 이용하지 못하도록 인공적으로 • 만든 오차 • 95% 확률로 최대 100m까지 오차를 유발 • 2000년 5월 1일 자정을 기해 미국방성에서 공식적으로 해제
2. Outdoor localization 기술 < 오차요인과 오차범위 >
2. Outdoor localization 기술 • GPS 오차를 최소화하기 위한 GPS 응용 방법 • DGPS (Differential GPS) • - GPS의 요인별 오차를 보정 보면 위성이 가지는 오차 최소화하기 위하여 선행 • 측량 기준국의 좌표를 사용자의 GPS 수신기가 수신 받아 오차 최소화. • - Differential보정값은기준국과 이용자간의 거리에 관계가 있으며 200km 이내 • 에서 5~10m의 오차를 가짐. • - 기준국과측위 장소가 너무 떨어져 있지 않는 한 유효하며 위성궤도나 시계 오차, • 전리층이나 대류권의 영향 등을 거의 제거 할 수 있음 < DGPS의 동작 원리 >
2. Outdoor localization 기술 < DGPS의 측위 절차>
2. Outdoor localization 기술 < 우리나라 DGPS기준국 설치 현황>
2. Outdoor localization 기술 • RTK-GPS (Real-Time Kinematic GPS) • - 정밀한 위치를 확보한 기준점의 반송차 오차 보정값을 이용하여 사용자가 실시간 • 으로 수 ㎝의 정밀도를 유지하는 관측치를 얻음. • - 오차보정을 위해 기준국에서 전송되는 데이터가 반송파 수신자료라는 것을 제외 • 하고는 DGPS개념과 거의 유사하지만 RTK가 각 위성에 대한 반송파 측정값을 • 지속적으로 제공하여야 하고 정보의 전송장애로 발생할 수 있는 오차의 한계가 • DGPS보다 상대적으로 크기 때문에 보다 안정적이고 신속한 정보전달 통신 • 시스템이 요구됨. < RTK-GPS의 동작 원리 >
2. Outdoor localization 기술 < RTK-GPS의 측위 절차>
2. Outdoor localization 기술 < DGPS와 RTK-GPS의 비교>
2. Outdoor localization 기술 • 2.2 관성 센서 • 초기에는 항공우주 산업, 방위산업, 자동차등에 사용되다가 전자제품, 휴대폰 등으로 사용범위가 확대. • Consumer용센서사용범위 • -노트북, 휴대폰, 게임기, 카메라, 캠코더 등 • High performance용센서 사용범위 • - 자동차의 에어백, TPMS, Navigation, 등 • 그 밖의 지진감지, 산업로봇, 항공우주산업, 방위산업계에서 사용됨. 자이로 센서 가속도 센서 컴파스 센서
2. Outdoor localization 기술 2.2.1 가속도 센서 • 선형 가속도센서와 각 가속도센서로 구분.(원리는 동일) • 감지 방식에 따른 분류 • 변위형(displacement type) • 공진형(resonant type) < 선형 가속도와 각 가속도 >
2. Outdoor localization 기술 • 변위형가속도 센서 • :가속도의 크기에 비례하는 측정계에 대한 진동질량의 상대 운동을 감지하는 장치. • 외부 인가 가속도에 비례하여 발생하는 변위를 검출하고,이로부터 가속도를 측정 • 하는방식. • 가속도센서의 구성 • -가속도를 힘으로 변환하는 진동질량(seismic mass) • -진동질량을 지지하고 복원력을제공하는 스프링 보(spring beam) • -주파수 응답특성을 좌우하는 감쇠기(damper) < 변위형 가속도센서의 구성 >
2. Outdoor localization 기술 • 공진형 가속도 센서 • :진동계의 강성이 외부 인가 가속도에 의해 변하는 방식으로 구현한 뒤, 이에 의해 • 달라지는 고유진동수를 측정하는 방식. • 가속도 센서의 특성 • - 인가 가속도에 의한 주파수 분해능이 높아서 감도가 매우 높음. • - 출력이 주파수 신호이기 때문에 디지털 신호처리가 매우 용이. • - 동작중계속 공진하고 있기 때문에 상시 자기 진단이 가능. • - 주파수 분해능을 높이가 위해 공기에 의한 감쇠를 최소화해야 하므로 진공에서 동작. • - 신호 처리가 복잡. • - 주파수 변화 검지방식에 따라 변화형과 강성 조정형으로 분류. < 공진형 가속도 센서의 원리 >
2. Outdoor localization 기술 2.2.1 자이로 센서 • 중앙의 팽이가 어느 방향으로든 회전할 수 있도록 수직고리를 가짐. • 팽이가 회전하기 때문에 회전축이 항상 일정한 방향을 유지함. • 자이로 센서 분류법 • 모양 및 구동모드 : 짐벌형, 튜닝 포크형, 선혀 구동형, 회전 구동형, 링형등 • 구동방식 : 정전용량검지, 압전검지, 압저항검지, 터널링검지 등 < 자이로스코프의 구조 >
2. Outdoor localization 기술 • 자이로 센서의 종류 • 기계식 진동 자이로 • - 코리올리힘을이용하는 대표적인 센서. • - 코리올리식 센서의 동작원리 • : 운동하는 질량에 각속도 인가에 의한 코리올리힘이 발생하는 것을 검출. < 코리올리의 힘 >
2. Outdoor localization 기술 • 광 자이로 • -광자이로의 원리 • : 일반상대론에서 도출되는 사냑효과(sagnac effect)를 기초로 함. • - 광자이로의특징 • : 가동부분이 없어 가속도에 강하며, 기동시간이 짧음. • 구조가 간단하여 작고 가벼우며 저전력으로 동작. • 높은 직진성을 자지고 있어 측정범위가 넓으며 • 고감도의 특성을 가짐. < 광자이로의사냑효과>
2. Outdoor localization 기술 • -광자이로의 특징 및 분류. • 가동부분이 없어 가속도에 강함. • 기동시간이 짧으며 측정범위가 넓음. • 구조가 간단하여 소비전력이 적으며 작고 가벼움. • 직진성이 뛰어남. < 광자이로의 분류 >
2. Outdoor localization 기술 2.2.1 마그네틱컴파스 • 전자마그네틱내부에는 자기장 기술을 이용한 2개의 자기장 센서가 자기장 • 방향으로 직교하게 배치되어 미약한 지구자기장을 측정하여 자북에 의한 • 지구방위각을 구할 수 있음. • X축과 Y축을 측정하도록 90°로 직교하는 2개의 센서를 가짐. < 컴파스의 구조 및 출력 >
2. Outdoor localization 기술 • 컴파스의 출력 • 이상적인 지구자기장 • 컴파스에서 측정된 자기장(오차성분이 더해짐) • 측정된 오차 • 측정된 오차의 x, y성분
2. Outdoor localization 기술 • 컴파스의 오차 • 편차(Variation) • - 극지방을 기준으로 측정된 방향을 진방향(True Direction)이라고 함. • - 마그네틱컴파스가가리키는 자기북극(Magnetic North Pole)은 이 • 지형학적 북극과 일치하지 않음. • - 등방위 각석을 이용해 해당지역의 편차 각도를 알 수 있음. < 컴파스의 오차분류 > < 등방위 각석 >
2. Outdoor localization 기술 • 복각(diperrors) • - 자기력선들은지구의 자기북극에서 시작하여 자기남극으로 들어감. • - 극지방에서 자기력선은 지구 표면과 직각을 이루게 됨. • - 각각의 자기극지방으로부터 정확히 중간지점인 자기적도(Magnetic Equator) • 에서 이 자기력선은지구 표면과 평행을 이룸. • - 지구 북반구의 중간정도 되는 위도에서 운용될 때 평행이 되도록 작은 무게추가 • 따라 복각(Dip Errors)을 보상할 수 있음. • - 무게추로인해북선오차(Northerly Turning Error), 가속도오차(Acceleration Error) • 가 발생 • 자차(Deviation) • - 장치들의 내부에서의 자기장은 각종 전류에 의해 간섭을 받아 지구 자기장과 • 달라지는 오차. • - 자차(Deviation)는 편차(Variation)와 달리, 각각의 헤딩(Heading)에 따라 달라지며 • 지형학적위치에 의해서는 영향을 받지 않음.
3. 정밀 실외 위치추정 시스템 구성 • GPS와 Dead Reckoning을 이용한 통합 시스템 구성 • DR은 이미 위치를 알고 있는 한점에서 진행 방향 속도 및 자세각을 • 이용하여 새로운 항체의 위치를 계산하는 항법.
3. 정밀 실외 위치추정 시스템 구성 • GPS와 Dead Reckoning을 이용한 통합 시스템 구성의 예
3. 정밀 실외 위치추정 시스템 구성 • GPS와 INS을 이용한 통합 시스템 구성 • 실외위치추정 항법 중 관성항법 시스템 (Inertial Navigation System, • INS) 과 GPS를 결합하여 GPS의위치 오차를 보정 정밀 위치 추정을 • 할 수 있음.
3. 정밀 실외 위치추정 시스템 구성 • GPS와 INS의 장/단점
3. 정밀 실외 위치추정 시스템 구성 • GPS와 INS을 이용한 통합 시스템 구성의 예
3. 정밀 실외 위치추정 시스템 구성 • GPS와 INS을 이용한 통합 시스템 구성의 예
T H A N K Y O U Pusan National University Intelligent Robotics aboratory