Robotic Arm Interaction Environment Project
The project aims to create similar work environments for SCARA and STÄUBLI robotic arms to perform tasks together using a track system. Hardware modifications are made to enable seamless interaction between the two manipulators. The project involves creating a table top, fabricating a gripper, and wiring pneumatics and sensors for efficient control. Special thanks to Lanco Assembly Systems for equipment donation.

Robotic Arm Interaction Environment Project
E N D
Presentation Transcript
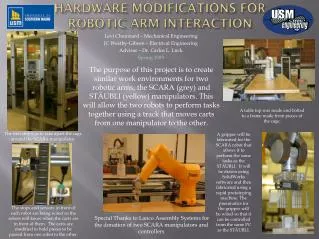
USM engineering Hardware Modifications for Robotic Arm Interaction The purpose of this project is to create similar work environments for two robotic arms, the SCARA (grey) and STÄUBLI (yellow) manipulators. This will allow the two robots to perform tasks together using a track that moves carts from one manipulator to the other. A table top was made and bolted to a frame made from pieces of the cage. Levi Chouinard – Mechanical Engineering JC Westby-Gibson – Electrical Engineering Advisor – Dr. Carlos L. Lück Spring 2009 The first step was to take apart the cage around the SCARA manipulator. A gripper will be fabricated for the SCARA robot that allows it to perform the same tasks as the STÄUBLI. It will be drawn using SolidWorks software and then fabricated using a rapid prototyping machine. The pneumatics for the gripper will be wired so that it can be controlled from the same PC as the STÄUBLI. The stops and sensors in front of each robot are being wired so the robots will know when the carts are in front of them. The carts are modified to hold pieces to be passed from one robot to the other. Special Thanks to Lanco Assembly Systems for the donation of two SCARA manipulators and controllers