Plate Motions and Rotation Tensors
110 likes | 179 Views
Learn about finite and infinitesimal rotations characterizing plate movements on Earth's surface, with examples of great and small circles and the calculation of motions in a geographic framework. Explore the rotation tensor and its components.

Plate Motions and Rotation Tensors
E N D
Presentation Transcript
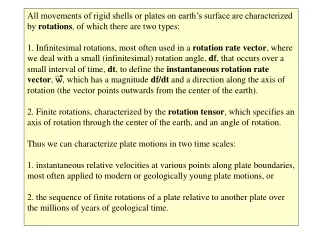
All movements of rigid shells or plates on earth’s surface are characterized by rotations, of which there are two types: 1. Infinitesimal rotations, most often used in a rotation rate vector, where we deal with a small (infinitesimal) rotation angle, df, that occurs over a small interval of time, dt, to define the instantaneous rotation rate vector, w, which has a magnitude df/dt and a direction along the axis of rotation (the vector points outwards from the center of the earth). 2. Finite rotations, characterized by the rotation tensor, which specifies an axis of rotation through the center of the earth, and an angle of rotation. Thus we can characterize plate motions in two time scales: 1. instantaneous relative velocities at various points along plate boundaries, most often applied to modern or geologically young plate motions, or 2. the sequence of finite rotations of a plate relative to another plate over the millions of years of geological time.
N W E S This is a projection of the earth’s surface, looking from the outside downwards, with the axis of rotation intersecting the surface at the pole of rotation shown by the green circle. In this view, the great and small circles are NOT geographic coordinates, but forms a grid system arrayed relative to the pole of rotation.
N W E S Examples of two abitrary great circlesemanating from the pole of rotation. These two great circles represent a rotation of 20 degrees about the pole of rotation. For positive rotation, the left hand great circle 1 rotates to the right hand great circle 2. 1 2
N W E S Examples of two abitrary small circles (perpendicular to the great circles) are shown in blue. For a rotation about the pole, all small circes concentric to the pole give possible paths for rotation about the pole.
N W E S Shown is how some point, Q1, moves to position shown by Q2 as a result of the 20 degree rotation about the pole of rotation. Q1 Q2
N W E S Shown is how some point, Q1, moves to position shown by Q2 as a result of the 20 degree rotation about the pole of rotation. The problem is how to calculate these motions of points in a geographic framework, where the pole of rotation is NOT at the north pole. This is what the rotation tensor does. Q1 Q2
N W E S Now we show things in a geographic framework, with the pole of rotation located somewhere at mid-latitudes in the northern hemisphere. Again, we are looking down on the earth, with the grid now representing latitudes and longitudes. Q2 Q1
N W E S Now we show things in a geographic framework, with the pole of rotation located somewhere at mid-latitudes in the northern hemisphere. Again, we are looking down on the earth, with the grid now representing latitudes and longitudes. The rotation tensor multiplies a unit vector at the center of the earth intersecting the surface at Q1 to yield a second unit vector which intersects the surface at Q2. The rotation tensor is characterized by the orientation of the rotation axis (intersecting the surface at the pole or rotation) and the amount of rotation. Q2 Q1
y x Relationship between latitude (LAT) and longitude (LON) of a point to x, y and z coordinates of a unit vector pointing to the point. The function XYZ and LATLON in DAZROT go from one to the other.
The rotation tensor, RT, defined in the x-y-z coordinate system, multiplies a unit vector pointing to a location on the surface, Q1. The result is a new unit vector pointing to the location Q2. The tensor RT has in it the location of the pole of rotation and the angle of rotation. If RT = and the unit vector pointing to Q1 has components (Q1x, Q1y, Q1z), then = X according to the rules of matrix multiplication.The components of the tensor RT are detailed in the DAZROT.xls or ROTATION.xls macro sheets. RTxx RTxy RTxz RTyx RTyy Rtyz RTzx RTzy RTzz Q2x Q2y Q2z RTxx RTxy RTxz RTyx RTyy Rtyz RTzx RTzy RTzz Q1x Q1y Q1z