Download
1 / 14
140 likes | 244 Views
Evaluate different designs for a robotic arm with detailed comments on components, balance issues, and optimization potential, focusing on MSA Control Board integration.

E N D
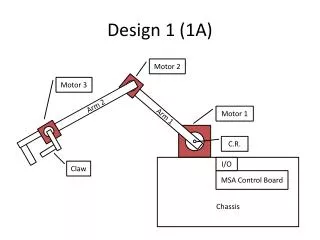
Design 1 (1A) Motor 2 Motor 3 Arm 2 Motor 1 Arm 1 C.R. Chassis I/O Claw MSA Control Board
Design 1 Comments (1A) • This analysis is overly generous for a student design of the MSA • No provisions for counterweights were made • No true product weights were incorporated, only conservative estimates • Likely exceeds the true design significantly
Design 2 (1A) Motor 2 Motor 3 Motor 1 Arm 2 Arm 1 I/O C.R. Chassis MSA Control Board Claw
Design 2 Comments (1A) • A more reasonable design for an MSA robotic arm design • Contains arm lengths more optimized at an edge location to meet the minimum requirements • Does not incorporate a counterweight system • Closer to a true design
Design 3 (1A) Motor 2 Motor 3 Motor 1 Arm 2 C.R. Arm 1 I/O Claw Chassis MSA Control Board
Design 3 Comments (1A) • A more reasonable design for an MSA robotic arm design • Contains arm lengths more optimized at an edge location to meet the minimum requirements • Includes a raised servo motor and counterweight provision • Closer to a possible design
Design 4 (1B) Arm 2 C.R. Arm 1 I/O Motor 2 Chassis MSA Control Board Motor 1 Claw
Design 4 Comments (1B) • A more difficult design as it will be extremely difficult to control position of the end effector • Still a possible design • Reduces number of design components
Design 5 (1C) Motor 1 Arm 1 I/O Arm 2 Chassis MSA Control Board Motor 2 Claw
Design 5 Comments (1C) • Arm can swing either in any plane perpendicular with the ground • Reduces number of necessary motors and drive components
Design 6 (1D) Motor 1 Arm 1 Motor 2 Arm 2 I/O Chassis MSA Control Board Claw
Design 6 Comments (1D) • Includes a pin and slotted member at Arm 2 to allow movement • More prone to binding at surfaces • Can certainly be optimized more than this
Design 7 (1E) Motor 1 Motor 2 Arm 1 C.R. I/O Chassis MSA Control Board Claw
Design 7 Comments (1E) • Simplest design for number of components • Allows for simplest cg and calculations for moments • Includes the use of a counterweight for feasibility