GIS-Enabled Kinematic Wave Approach for Vegetated Buffer Systems
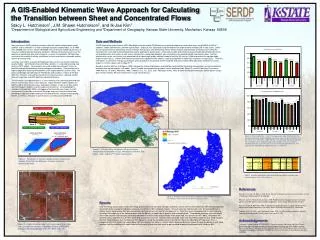
This study explores a GIS-based method for transitioning between sheet and concentrated flows in vegetated buffer systems to reduce non-point source pollution. It focuses on utilizing digital elevation models and kinematic wave theory to optimize VBS placement. The research presents a new erosion potential predictive model (nLS) and compares its effectiveness with existing tools. Through detailed data analysis and methodology, the study aims to enhance water quality management practices.

GIS-Enabled Kinematic Wave Approach for Vegetated Buffer Systems
E N D
Presentation Transcript
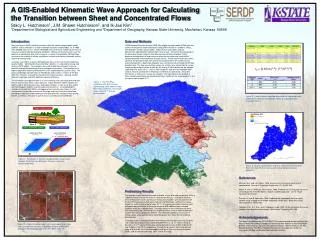
Figure 1. Schematic of “typical” vegetated buffer system with diagram illustrating key differences between sheet and concentrated flows. A GIS-Enabled Kinematic Wave Approach for Calculatingthe Transition between Sheet and Concentrated Flows Stacy L. Hutchinson1, J.M. Shawn Hutchinson2, and Ik-Jae Kim11Department of Biological and Agricultural Engineering and 2Department of Geography, Kansas State University, Manhattan, Kansas 66506 Introduction Non-point source (NPS) pollution has been called the nation’s largest water quality problem, and its reduction is a major challenge facing our society today. As of 1998 over 290,000 miles of river, almost 7,900,000 acres of lake and 12,500 square miles of estuaries failed to meet water quality standards. Military training maneuvers have the potential to significantly alter land surfaces in a manner that promotes NPS pollution, resulting in the inability of military installations to meet water quality standards and the decline of training lands. Currently, most efforts to reduce NPS pollution focus on the use of watershed water quality models. Identification of overland flow networks is a vital preprocessing step for these NPS models. Flow networks are used to determine transport routes for pollution and optimal placement of best management practices. One practice that is widely adopted for reducing NPS pollution is the vegetated buffer system (VBS). The primary hydrologic consideration for VBS design and function is uniform sheet flow. With time, however, overland flow concentrates and channelizes, reducing contact time with vegetation and NPS pollution reduction efficiency. The kinematic wave approximation is a useful technique for calculating overland flow time of concentration within a drainage area. Digital elevation models (DEMs) are widely used for determining various landscape variables, as well as for delineating overland flowpath networks and drainage area boundaries. Using topographic variables estimated from DEMs and applying the kinematic wave theory in a GIS environment, it is possible to estimate the length and travel time of overland flow providing an improved understanding of VBS placement for maximum water quality benefit, as well as a reduction in gully erosion caused by concentrated flow. Data and Methods USGS National Elevation Dataset (NED) 30m digital elevation model (DEM) data was used to develop three raster data layers using ESRI’s ArcGIS 9.1 software: Slope, flow direction, and flow accumulation. Slope (S) was calculated using the deterministic eight direction method (D8) in 3 by 3 cells. Unlike the normal procedure for delineating stream networks, flow direction was determined without “filling” because characteristics of land curvature affect the transition from sheet flow to concentrated flow and the potential for gully erosion. A flow accumulation grid, which connects the direction of flow from cell to cell and determines the number of cells accumulating within a downslope flowpath, was estimated using standard ArcGIS flow direction tools. The flow accumulation values (no. of cells) was converted into a slope length grid by multiple number of cells by 30, then by 3.208 to determine the upslope slope length for each cell (L). Kansas GAP landcover data for the installation were used to create a grid dataset for Manning’s coefficient (n) data layers. From this information, a continuous “energy accumulation” grid calculated as the product of three separate data layers representing Manning’s coefficient (n), slope length (L), and the square root of slope (S-0.5). Based on work by McCuen and Spiess (1995) showing the relationship between overland flow concentration and energy accumulation, an erosion potential predictive tool was developed, nLS model. The nLS model was compared to previous erosion prediction tools (Meyer, A. and J.A. Martinez-Casasnovas, 1999; Prosser, I.P. and B. Abernethy, 1996; Tarboton, D.G., R.L. Bras, and I. Rodriguez-Iturbe, 1991) for determining ephemeral gully erosion points using a data set from Cheney Reservoir watershed in south-central Kansas. Shrubs – nutrient removal Zone 3 Zone 2 Zone 1 Trees – bank stabilization Grass – control runoff, sediment Uniform Sheet Flow A = W x L Concentrated Flow A = W x L x β β = A – Ineffective Area Figure 5. Overall accuracy (%) for the energy accumulation model (nLS), the energy accumulation model including soil critical shear strength (nLSCSS), and the wetness threshold index model (WTI) for the calibration watershed (top) and the nLS model for the validation watersheds (bottom). Intervals of mean± standard deviation (µ±σ) refer to the statistic for the gully point locations. The total area considered in the model increases as σ increases. L Figure 3. The Fort Riley installation with grid surfaces representing (from bottom to top): Manning’s coefficient, flow length, slope, and nLS-0.5 energy accumulation. W Table 1. Relationship between gully head location prediction and watershed area required for the µ±1.0σ model run. References McCuen, R.H. and J.M. Spiess. 1995. Assessment of kinematic wave time of concentration. Journal of Hydrologic Engineering 121 (3):256-266. Meyer, A. and J.A. Martinez-Casasnovas. 1999. Prediction of existing gully erosion in vineyard parcels of the NE Spain: a logistic modeling approach. Soil & Tillage Research 50: 319-331. Prosser, I.P. and B. Abernethy. 1996. Predicting the topographic limits to a gully network using a digital terrain model and process thresholds. Water Resources Research 32(7): 2289-2298. Tarboton, D.G., R.L. Bras, and I. Rodriguez-Iturbe. 1991. On the extraction of channel networks from digital elevation model. Hydrological Processes 5:81-100. Acknowledgements This work is funded through CPSON-03-02 (Characterizing and Monitoring Non-Point Source Runoff from Military Ranges and Identifying their Impacts to Receiving Water Bodies) and the Kansas Agricultural Experiment Station. Special thanks to Mr. Phil Woodford and the Fort Riley Integrated Training Area Management (ITAM) for assistance with field site development and data collection. 30m USGS 30 m Figure 4. Energy accumulation grid for a subwatershed of Cheney Reservoir, near Wichita, Kansas with actual ephemeral gully locations. 3 m 10 m Results Only the energy accumulation (nLS), the energy accumulation with soil shear strength (nLSCSS), and the wetness threshold index (WTI) models provided reasonable gully head point predictions and were selected for further statistical analysis. The user accuracy (commission error), the area predicted to contain a gully head location that does not contain a gully head, was very low for all models (<1%). While this result is disappointing, it is not surprising based on the complexity of the erosion process and the difficulty in modeling this process with a simplified tool. The producer accuracy (omission error), the number of gully head locations correctly predicted of the total number of gully heads in the watershed, was greatest for WTI (88%), followed by the nLSCSS (53%), and then nLS (27-69% depending on statistical interval). However, because of the large area required to predict the gully head locations, the total model accuracy was the lowest for WTI (figure 5). Using the statistical interval of µ±1.0σ the total area required by WTI was over 40% as compared to the nLS model that required only 20% of the land area (table 1). Further work in being conducted to reduce the over prediction of gully head locations, but the simplified nLS model reduces the amount of land area that needs to be searched for potential ephemeral gully heads by 80%. Figure 2. Digital elevation models of varying spatial resolutions with resulting flow networks superimposed upon a false color composite aerial photograph of the Fort Riley study site.