Download

1 / 41
420 likes | 609 Views
Flexible Sensorimotor Strategies using Muscle Synergies. ارائه كننده: علي فلكي استاد : جناب دكتر توحيدخواه. مقدمه. سيستم حركتي انسان سينرجي (تعريف) روشهاي استخراج سينرجيها وجود عدم قطعيت در سيستم عصبي حركتي و نياز به مدل دروني كنترل بهينه پسخوري تئوري مانيفولد كنترل نشده

E N D
Flexible Sensorimotor Strategies using Muscle Synergies ارائه كننده: علي فلكي استاد : جناب دكتر توحيدخواه
مقدمه • سيستم حركتي انسان • سينرجي (تعريف) • روشهاي استخراج سينرجيها • وجود عدم قطعيت در سيستم عصبي حركتي و نياز به مدلدروني • كنترل بهينه پسخوري • تئوري مانيفولد كنترل نشده • كنترل حركت توسط سينرجيهاي عضلاني
سيستم حركتي انسان • برخي ويژگيهاي سيستم حركتي انسان: • يادگيري و تطابق • درجات آزادي فراوان • وجود عدم قطعيت در سيستم حسي و حركتي • تكرارپذيري و قابليت اطمينان دستيابي به اهداف حركتي • تفاوت حركت ها در جزئيات • وجود نويز در سيگنال حسي و حركتي 3
مشكل درجات آزادي • مثلا براي حركت دست در صفحه افق متغيرهاي فضاي حالت: 2 متغير زواياي مفصل، 2 متغير سرعت زاويهاي مفاصل و 6 متغير براي فعاليت ماهيچهها • براي مدل نسبتا كاملي از دست (شامل مچ و انگشتان) اگر10 مفصل و 50 ماهيچه درنظر گرفته شود، تعداد متغيرهاي حالت به 70 ميرسد. • در اين فضاي كنترلي بهدليل بعد بالاي فضاي حالت، با مشكل دردسر بعد زياد مواجه ميباشيم. 4
مشكل درجات آزادي (ادامه) • روش هاي پيشنهاد شده براي حل مشكل درجات آزادي: • استراتژي حذف كردن (Bernstein 1967, Newell 1991, Vereijken et al. 1992) • استفاده از روشهاي بر مبناي بهينهسازي (Mussa- Ivaldi 1991, Rosenbaum et al. 1995, Todorov 2002,2004) • سينرجي (در سطح نيروها، واحدهاي موتوري و ماهيچهها)(Mussa-Ivaldi et al. 1994,Thoroughman & shadmehr 2000, Todorov 2002, Cheung 2007, Latash et al. 2010) 5
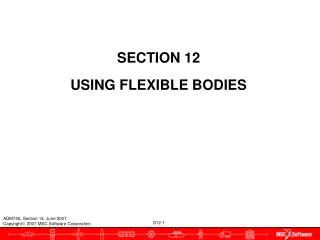
بلوكهاي حركتي اوليه بلوك هاي حركتي بر مبناي ايدهاي است كه خروجي حركتي ساختاري ماجولار دارد • ميدانهاي نيرو • تحريك الكتريكي نخاع منجر به فعاليت ماهيچهاي شده كه در نقطه خاصي به تعادل ميرسد • تحريك همان نقطه در وضعيتهاي مختلف عضو منجر به اندازه و جهتهاي انقباضي متفاوتي ميشود كه به يك نقطه همگرا است • حركت به صورت تركيب اين ميدانها ايجاد ميشود
A و :B ميدان نيروي ناشي از تحريك دو نقطه متفاوت از نخاع C: ميدان محاسبه شده براي تحزيك توام A و B D: ميدان واقعي ناشي از تحريك توام A و B
تعاريف متفاوت سينرجي • دو ماهيچه با عملكرد مشابه را ماهيچههاي سينرجيك و ماهيچههاي با عملكرد مخالف را آنتاگونيست گويند (Kandel et al. 2000) • ماهيچههايي كه براي رفتاري خاص، با يكديگر فعال ميشوند را تحت يك سينرجي دستهبندي ميكنند (Smith et al. 1985). در اين تعريف تنها از زمان شروع و پايان براي تعيين سينرجيها استفاده ميشود. 8
تعاريف متفاوت سينرجي (ادامه) • استخراج سينرجيها از دادههاي EMG چند كاناله با استفاده از PCA(Shemmell et al. 2005, Krishnamoorthy et al. 2003) يا ICA(Hyvarinen & Oja 2000, Hart &Giszter 2004). در اين تعريف يك ماهيچه ميتواند متعلق به چندين سينرجي باشد. در اين تعريف سينرجي، تعادلي ميان پروفايل فعاليت چندين ماهيچه است. 9
تعاريف متفاوت سينرجي (ادامه) • مشابه تعريف قبل، هر سينرجي نمايش تعادلي ميان پروفايل فعاليت ماهيچهها است. فرق اين تعريف با تعريف قبل، اين است كه فرض ميشود كه مولفههاي سينرجي و نيز ضرايب فعاليت آنها مثبت هستند. (d’Avella 2000, Ting & Mcpherson 2005, Cheung et al. 2005) تعداد سينرجيهاي بدست آمده در دو تعريف اخير، كمتر از تعداد بدست آمده از تعريف 2 است (Krouchev et al. 2006). • در تعريفهاي بالا، سينرجيها سنكرون فرض شده اند كه ميتوانند متغير با زمان نيز باشند. (d’Avella et al. 2006) 10
تعاريف متفاوت سينرجي (ادامه) • اين تعريف نيز مشابه با 2 تعريف قبل است. سينرجيها، گروههايي از المانها هستند كه متغير عملكردي خاصي را پايدار ميسازند (در اين حالت از تئوري UCM) استفاده شده است كه در صفحات بعد توضيح داده شده است. (Krishnamoorthy et al. 2003, Asaka et al. 2008, Marieke et al. 2011) 11
سينرجي • سينرجي ماهيچهاي: فعاليت منسجم، زماني و مكاني مجموعهاي از ماهيچهها در ارتباط با يكديگر به منظور پايدار ساختن متغير عملكردي خاص • پروفايل فعاليت ماهيچهاي از تركيب اين سينرجيها (شيفت زماني و ميزان فعاليت) ايجاد ميشود 12
سينرجي مزيتهاي استفاده از سينرجي در كنترل حركت: • كاهش افزونگي بهدليل محدود ساختن مجموعه الگوهاي ماهيچهاي قابل دسترس • حذف الگوهاي ماهيچهاي خاص كه منجر به حركات ناهماهنگ ميشوند به دليل فعاليت گروهي ماهيچهها • ساده ساختن تعميم دهي كنترل حركت بااستفاده از اصلاح ميزان و نحوه فعاليت مجموعه ثابتي از سينرجيها • نگاشتي مابين اهداف حركتي (در سطح انجام حركت) و دستورات حركتي (در سطح فرمانهاي مغزي) 13
روشهاي استخراج سينرجيها • دادههاي عملي عمدتا بسيار پيچيده و با بعد بالا هستند. از روشهاي جداسازي ماتريسي به منظور تعيين زيرفضاي اصلي مربوط به داده واقعي ميتوان استفاده كرد. • برخي روشهاي مطرح در استخراج سينرجي ها • ICA (Bell & Sejnowski 1995, Kargo & Nitz 2003, Hart & Giszter 2004) • PCA (Jolliffe 2002, Krishnamoorthy et al. 2003,Shemmell et al. 2005) • Nonnegative Matrix Factorization (Lee & Seung 1999, Tresch et al. 2006, Cheung 2007, Cheung et al. 2009) • UCM (Scholz & Schoner 1999, Asaka et al. 2008, Marieke et al. 2011) 14
نحوه تعيين سينرجيهاي ماهيچهاي • ثبت EMG از تعدادي ماهيچه در طي انجام حركتي خاص • تعيين مجموعهاي از سينرجيها (بردارهاي پايه اصلي) با استفاده از روشهاي تجزيه ماتريسي چون تجزيه غيرمنفي ماتريس يا آناليز مولفههاي مجزا • ارزيابي: آيا مجموعه سينرجيها ميتوانند به خوبي، پايگاه داده اوليه (EMG هاي ثبت شده) را توصيف كنند؟ • ارتباط مابين سينرجيهاي استخراج شده و متغيرهاي موردنظر سيستم عصبي حركتي 15
الگوريتم تجزيه غيرمنفي ماتريس (NMF) • سينرجيهاي به دست آمده از PCA و يا ICA حالتي جامع دارند يعني مولفههاي غيرصفر براي بيشتر ماهيچههاي درگير وجود دارند. • با استفاده از روش NMF، سينرجيهاي مشترك بين حركتهاي متفاوت و سينرجيهاي خاص هر حركت را ميتوان همزمان تعيين نمود. (الگوريتم بروز رساني به صورت ضربشونده) • NMFبا داشتن ماتريس غيرمنفي V، ماتريسهاي غيرمنفي W و H را به دست ميآورد كه: (r كوچكتر از n و m انتخاب ميشود 16
الگوريتم تجزيه غيرمنفي ماتريس (ادامه) • اين الگوريتم نياز به 2 ورودي دارد • تعداد سينرجيها: N • ماتريس سيگنالهاي كنترلي • هدف الگوريتم يافتن مجموعهاي مناسب از سينرجيها است كه • در هر قدم W و Cبه صورت ضربي بروز ميشوند • اين روش هنگاميكه حركات از لحاظ مدت زمان اجرا بسيار متفاوت باشند، قابل اعمال نميباشد. 17
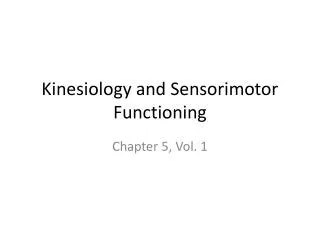
انواع سينرجي Synchronous synergies: تاخير زماني بين ماهيچهها مجاز نميباشد فعاليت تمامي ماهيچههاي موجود در سينرجي در هنگام فعال شدن سينرجي Time varying synergies: بخش زماني: هر ماهيچه پروفايل زماني خاص خود را دارد. بين فعاليت ماهيچهها در سينرجي، تاخير وجود دارد بخش مكاني: توازن فعاليت ميان ماهيچه ها 18
Time-varying muscle synergy دو سينرجي ماهيچهاي وابسته به زمان
ساختار سلسله مراتبي سينرجيها • فرض: ساختار سلسله مراتبي براي سينرجي در سيستم عصبي حركتي مشابه با ساختار كنترل حركت • سينرجي، نگاشتي مابين اهداف حركتي و دستورات حركتي است كه موجب كنترل ساده ويژگيهاي بيومكانيكي خاص ميشود 21
نمودار ون • آيا سينرجيهاي مشاهده شده تنها بازتابي از قيود آزمايش هستند و يا قيود نوروني ساده كننده مساله درجات آزادي؟ 22
كنترل بهينه پسخوري و سينرجي • تعريف: پاسخي متفاوت به ورودي يكسان برحسب هدف • با استفاده از تكنيكهاي كنترل بهينه، عموما يك فضاي كنترلي با بعد كمتر تعيين ميشود كه منعكس كننده ديناميك مرتبط با عمل است. • اين فضاي كنترلي را ميتوان توسط سينرجيهاي ماهيچهاي تخمين زد. • Todorov پيشنهاد كرده است (2002) كه تنها انحرافات متضاد با اهداف حركتي، اصلاح شوند. • Stochastic Optimal Feedback Control • با اين روش اجازه تغييرات در ابعاد اضافه داده شده است • اصلاحات هوشمند 23
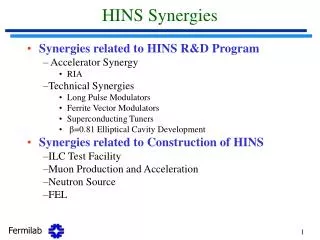
ايده تعامل در سينرجي توليد نيرويي ثابت توسط دو انگشت • D1: no co-variation • D2: stablizing synergies • D3: Destablizing 24
نكاتي براي بهبود نظريه سينرجي • در كنترل بهينه پسخوري، هدف تعيين بعدهاي مربوط و نامربوط به عمل به منظور كاهش بعد و امكان كنترل حركت است • افزونگي منجر به انعطاف پذيري ميشود. استفاده از درجات آزادي توسط سيستم عصبي مركزي به منظور بهتر كردن انجام عمل • استفاده از تئوري مانيفولد كنترل نشده براي تعيين بعدهاي مرتبط با حركت 26
مانيفولد كنترل نشده (حداقل دخالت) • در اين تئوري، روشي ارائه ميشود كه به توسط آن ميتوان درجات آزادي كنترل شده و كنترل نشده را تست نمود. در اين تئوري كنترل معادل با پايدار ساختن در نظر گرفته ميشود. • اين تئوري معادل با اين سوال است كه در چه فضايي، سيستم عصبي حركات چند مفصلي رانمايش داده و كنترل (برنامه ريزي حركت) ميكند (Scholzman & Schoner 1999). • تمايل سيستم عصبي مبني بر كنترل پارامترهاي مربوط به حركت در سطح ماهيچهاي (Francisco 2009) 27
مانيفولد كنترل نشده (ادامه) • به صورت رياضياتي ميتوان پايداري يك حالت خاص را، تغييرپذيري متغير مربوط به آن حالت در زمان در نظر گرفت. • اگر نقطه ثابت در زمان متغير باشد، تخميني از تغييرپذيري را ميتوان توسط چندين مرتبه تكرار حركت و سپس آناليز سيستم در نقاط مشابه، بدست آورد. • تغييرپذيري، نمادي از كنترل كارا در نظر گرفته ميشود و نه نمادي از ضعف كنترل • در اين رويكرد، هدف سيستم عصبي مركزي، تعيين درجات مرتبط با عمل است و نه كاهش درجات آزادي. • به اين ترتيب تفاوت حركات در جزئيات ديده خواهد شد 28
مانيفولد كنترل نشده (ادامه) • يك فرضيه درباره آنكه كدام متغيرها، كنترل ميشوند را تشكيل داده و به صورت رياضياتي مينويسيم. • فضاي ممكن به دو زيرفضاي عمود بر هم تقسيم ميشود. يكي از اين زيرفضاها، شامل تمامي تركيبات ممكن از متغيرها است كه منجر به مقادير يكسان متغيرهاي كنترلي ميشود. • تغييرپذيري متغيرها در دو زيرفضا تخمين زده ميشود. براي درستي فرضيه بايستي تغييرپذيري در زيرفضاي كنترل نشده بيشتر باشد. • سينرجي شامل متغيرهاي اصلي است كه كنترل ميشوند. 29
وجود عدم قطعيت در سيستم عصبي عضلاني • نويز ارسال دستورات حسي حركتي، تمايل ماهيچه ها در توليد نويز • دقت كمتر در اجراي حركات سريع تر • نويز در سطح سيگنالهاي نوروني تبديل به عدم قطعيت در سطوح بالاتر شناختي ميشود. • سيستم عصبي براي مقابله با اغتشاشات خارجي و عدم قطعيتهاي موجود در سيستم، از افزونگي استفاده ميكند. • با استفاده از سينرجيهاي حركتي سعي ميشود تا علاوه بر كاهش بعد، مقاوم بودن سيستم نيز تا حد امكان حفظ شود. 30
مدل دروني • فرض: حالت سيستم از طريق سنسورهاي تاخيردار و نويزي بدست مي آيد • نياز به مدل دروني از حركت و پيشبيني • تخمين حالت از روي فيدبك ها و دستورات حركتي ارسالي • واريانس نقطه نهايي هنگامي حداقل است كه تراژكتوري تا حد امكان دقيق و با مصرف انرژي كمتري صورت گيرد (با فرض وجود نويز ضربي در سيستم عصبي حركتي) • هدايت يادگيري در سيستم حركتي توسط خطا و اندازه آن 31
مدل دروني (ادامه) • استفاده CNS از افزونگي ماهيچه ها به منظور ماكزيمم ساختن كارايي در حضور SDN • اين قواعد بايد يادگرفته شوند و ديگر به صورت ساده ( مدولاسيون سفتي) نيستند - فعاليت همزمان ماهيچهها و سينرجيهاي ماهيچهاي • ارتباط بين يادگيري مدل دروني و سينرجي چگونه است؟ 32
نقش فيدبك حسي در سينرجي • مرجع اصلي Cheung et al. 2007 : • بررسي EMG بر روي 13 ماهيچه پاهاي عقبي وزغ • عمدتا سينرجيها به صورت مركزي سازماندهي شدهاند • تفاوت الگوي فعاليت چه در دامنه و چه در زمان بيانگر نقش جريان سنسوري در تنظيم فعاليت سينرجيها است • نقش فيدبك در نحوه بكارگيري و مدولاسيون سينرجيها • نقش فيدبك در فعال ساختن سينرجيهاي وابسته به عمل 33
نقش فيدبك حسي در سينرجي (ادامه) A1: فعال شدن توسط دستورات نخاعي يا فرانخاعي، نقش فيدبك در مدوله ساختن فعاليت A2: قابل دسترسي توسط فيدبك، مسئوليت اصلاح انحرافات عضو A3: تنظيم هر عضله به صورت مجزا توسط سيگنال آوران A4: سازماندهي مجدد شبكههاي بين نوروني در اثر فيدبك 34
نقش فيدبك حسي در سينرجي (ادامه) • EMG وزغ سالم تغييرپذيري بيشتري دارد كه به معناي سازماندهي سينرجيها به صورت مركزي ميباشد • نقش فيدبك بين حيوانات مختلف، متفاوت است كه اين امر ميتواند به معناي تاثير تجارب قبلي در تعيين ميزان و نحوه تاثير فيدبك باشد • تاكنون چندان به اين مساله پرداخته نشده است 35
ويژگيهاي سينرجي • ويژگي هايي دائمي در حركت كه مشخصه اصلي آن كاهش بعد است • با مشاهده تجربي الگوي فعاليت ماهيچهاي و يا موقعيت عضو: الگوهاي مشاهده شده تنها زيرفضاي كوچكي از فضاي چندبعدي ممكن را دربر مي گيرند. به طور مثال در كار Simpkin 2009 ( گرفتن اجسام): بعد موثر در حركت 15 و بعد بدست آمده توسط سينرجي حدود 8 گزارش شده است 36
ويژگيهاي سينرجي (ادامه) • افزايش تعداد سينرجي ها با پيچيدهتر شدن عمل • بيشتر سينرجيها ثابت و مستقل از عمل هستند • برخي سينرجيها وابسته به عملي خاص هستند • نقش فيدبك در نحوه بكارگيري و مدولاسيون سينرجيها • نقش فيدبك در فعال ساختن سينرجيهاي وابسته به عمل • توليد حركتهاي بهينه جديد از طريق يادگيري تركيبات جديد بين سينرجيها 37
ويژگيهاي سينرجي ( اغتشاش حركتي) • با اعمال اغتشاش به عضو، الگوي فعاليت بسياري از سينرجيها تغيير ميكند اما تركيب سينرجيها نشان ميدهد كه سينرجيهاي استخراج شده تحت شرايط متفاوت ديناميك محيطي، مقاوم هستند. اين مساله ميتواند تاييدي باشند كه اين سينرجيها، نمايشي از ساختارهاي پايه كنترل شونده توسط سيستم عصبي مركزي هستند. 38
ويژگيهاي سينرجي (تمرين) • اثر تمرين بر روي سينرجيها (Asaka et al. 2008) • كاهش ميزان Co-contraction سينرجيها • ظهور سينرجيهاي تركيبي تمرين ميتواند منجر به تنظيم سينرجيهاي تركيبي شود و يا اينكه الگوي فعاليت سينرجيها را تغيير دهد. هدف پايدار ساختن هرچه بيشتر حركت يا هدف مورد نظر است. 39
شماي عمل كنترل توسط سينرجي سينرجيهاي ماهيچهاي. I، نگاشتي براي توليد دستورهاي حركتي (مشابه با محاسبات ديناميك معكوس). شبكه F، پيشبيني توالي سنسوري ناشي از دستورات حركتي. 40