Enhancing ADCP Data Quality and Analysis through Calibration and Regular Grids
This guide details the process of enhancing Acoustic Doppler Current Profiler (ADCP) data quality by using raw data to reduce errors while converting data to ASCII format. It outlines criteria for data depuration, calibration methods based on established research, and the generation of regular matrices for velocity and temperature data across transect repetitions. The approach improves accuracy in measuring water current velocities, depth, and corresponding environmental parameters. Adopt standardized methods for robust data collection and analysis.

Enhancing ADCP Data Quality and Analysis through Calibration and Regular Grids
E N D
Presentation Transcript
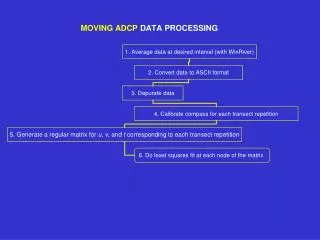
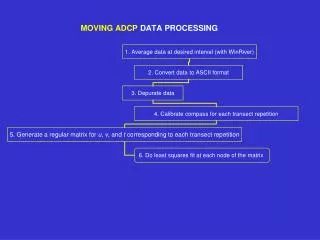
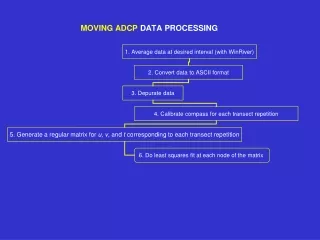
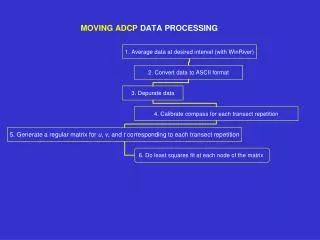
1. Average data to a greater interval Use raw data Decreases errors and increases data quality
2. Convert to ASCII format Generates large data files
depth cell length (cm) Bottom track vel (north in cm/s) Profiling mode Ensemble # time per ensemble (hundredths of s) # of ensembles in segment pitch roll corrected heading # of depth cells ADCP depth (cm) temperature Bottom track vel (east in cm/s) Distance traveled north (m) # of pings per ensemble Bottom track vel (error in cm/s) Total elapsed distance (m) Total elapsed time (s) Distance traveled east (m) Course made good (m) Ship velocity east (cm/s) Bottom track vel (vertical in cm/s) Ship velocity north (cm/s) Total distance traveled (m) # of bins to follow and units of measurement Velocity reference (BT, layer, none) and intensity units (dB or COUNTS) Intensity scale factor (dB/count) Sound absorption factor (in dB/m) Date and time Discharge Values Depth Reading (m) Water layer vel Lat & Lon % good Bin depth Velocity Magnitude Velocity Direction East Component North Component Vertical Component Error Echo Discharge
3. Depurate data with the following criteria: % good > 90% |error| < 8 cm/s discharge < 100 m3/s ship speed or bottom track speed > 1 m/s
Identify each transect repetition from start and ending times
4. Calibrate Compass Method of Joyce (1989, Journal of Atmospheric and Oceanic Technology, 6, 169-172) and Method of Pollard & Reid (1989) tan =< ubtvsh - vbtush>/<ubtush + vbtvsh> 1 + = [<ush2 + vsh2>/<ubt2+ vbt2>]1/2 ucorr = [1 + ][u cos - v sen ] vcorr = [1 + ][u sen + v cos ] where ubt is the East component of the bottom track velocity ush is the East component of the navigation velocity (from GPS) u is the East component of the current velocity measured by the ADCP ucorr is the corrected East component of velocity < > indicates average throughout one transect repetition Carry out the correction for each transect repetition
5. Generate a regular matrix for u, v, and t corresponding to each transect repetition Identify each transect repetition according to the time of beginning and end of each repetition
Draw each repetition placing the data (u, v, andt) on a regular grid (distance vs. depth) The origin of the matrix (zero distance) is arbitrary (e.g. a point at the coast) Calculate the distance from that origin to the location of each profile in order to generate the regular grid The end result is a group of Nregular grids, whereNis the number of transect repetitions. Each grid point has a time series ofNvalues foru,v, t, andbackscatter.