Enhancing Torque Prediction through Improved EMG Amplitude Estimation Techniques
10 likes | 115 Views
This study by Oljeta Bida under the guidance of Edward Clancy at Worcester Polytechnic Institute investigates the hypothesis that enhanced processing of Electromyography (EMG) amplitude leads to more accurate torque predictions in dynamic systems. The research focuses on developing an EMG-to-torque model that effectively captures the dynamics of joint movements by utilizing multiple EMG channels and improved noise-whitening techniques. Results indicate that better quality EMG signal processing significantly enhances prediction performance measured by % Variance Accounted For (VAF) and Mean Absolute Error (MAE).

Enhancing Torque Prediction through Improved EMG Amplitude Estimation Techniques
E N D
Presentation Transcript
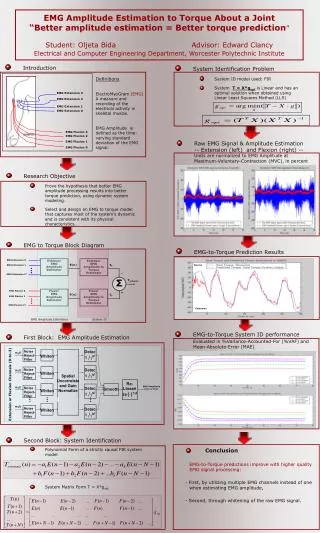
EMG Amplitude Estimation to Torque About a Joint“Better amplitude estimation = Better torque prediction”Student: Oljeta Bida Advisor: Edward ClancyElectrical and Computer Engineering Department, Worcester Polytechnic Institute Introduction Noise Reject-Filter Detect|·|d Whiten Noise Reject- Filter Detect|·|d Whiten Noise Reject-Filter Detect|·|d Whiten Noise Reject-Filter Detect|·|d Whiten • Research Objective • Prove the hypothesis that better EMG amplitude processing results into better torque prediction, using dynamic system modeling. • Select and design an EMG to torque model that captures most of the system’s dynamic and is consistent with its physical characteristics. EMG Extension 0 Extensor EMG Amplitude Estimator Extensor EMG Amplitude to Torque Estimator E(n) TE EMG Extension 1 … Flexion _ EMG Extension Lth Σ Testimate EMG Flexion 0 Flexor EMG Amplitude Estimator Flexor EMG Amplitude to Torque Estimator + F(n) TF EMG Flexion 1 … EMG Flexion Lth Extension EMG Amplitude Estimation System ID Extension or Flexion Channels (0-to-3) m0(t) m1(t) Spatial Uncorrelate and Gain Normalize Re-Linearize(·)1/d EMG Amplitude E(n) or F(n) m2(t) Smooth . . . . . . . . . m3(t) • System Identification Problem • System ID model used: FIR • System T = X*gopt is Linear and has an optimal solution when obtained using Linear Least Squares Method (LLS) Definitions ElectroMyoGram (EMG) A measure and recording of the electrical activity in skeletal muscle. EMG Amplitude is defined as the time- varying standard deviation of the EMG signal. EMG Extension 3 EMG Extension 2 EMG Extension 1 EMG Extension 0 EMG Flexion 3 EMG Flexion 2 • Raw EMG Signal & Amplitude Estimation -- Extension (left) and Flexion (right) --Units are normalized to EMG Amplitude at Maximum-Voluntary-Contraction (MVC), in percent EMG Flexion 1 EMG Flexion 0 • EMG to Torque Block Diagram • EMG-to-Torque Prediction Results • EMG-to-Torque System ID performance Evaluated in %Variance-Accounted-For (%VAF) and Mean-Absolute-Error (MAE) • First Block: EMG Amplitude Estimation • Second Block: System Identification • Polynomial Form of a strictly causal FIR system model • System Matrix Form T = X*gopt • Conclusion EMG-to-Torque predictions improve with higher quality EMG signal processing: - First, by utilizing multiple EMG channels instead of one when estimating EMG amplitude, - Second, through whitening of the raw EMG signal.





