Download
1 / 17
170 likes | 190 Views
Learn about traditional scheduling concerns, important scenarios, and the O(1) scheduler in Linux. Discover the challenges faced and the solutions offered by the Completely Fair Scheduler (CFS).

E N D
Scheduling of Regular Tasks in Linux David Ferry, Chris Gill, Brian Kocoloski CSE 422S - Operating Systems Organization Washington University in St. Louis St. Louis, MO 63143
Traditional Scheduling Concerns Throughput: Maximize tasks finished per time Latency: Minimize time between creation and completion Response time: Minimize time between wakeup and execution Starvation: All tasks guaranteed some processor time Fairness: All tasks given equal processor time Overhead: Multicore scalability, efficiency A scheduler must compromise! CSE 422S – Operating Systems Organization
Important Scheduling Scenarios Compute Bound (e.g. while(1) ) • Tries to keep the cache hot I/O Bound (e.g. always waits for keyboard) • Tries to respond as quickly as possible Server • Tries to minimize backlog of requests (throughput & latency) Desktop • Tries to maximize interactivity (like I/O bound case) • But must also handle heterogeneous workloads, multiple devices Real-time • Tries to make response times predictable • Must guarantee that critical tasks complete by their deadlines CSE 422S – Operating Systems Organization
What a Scheduler Must Decide • Which task should run next? • How long should it run? CSE 422S – Operating Systems Organization
Normal Task Priorities Based on “niceness” levels Levels range from [-20, 19], default is 0 “More nice” => “Lower Priority” (higher) “Less nice” => “Higher priority” (lower) Can be adjusted heuristically for interactiveand CPU bound tasks CSE 422S – Operating Systems Organization
O(1) Scheduler Fundamental idea: • Map nice values to fixed timeslices • E.g., • 0: 100 ms • 1: 95 ms • 2: 90 ms • … • When tasks exhaust their timeslice they move to expired array, if blocking they stay active • When active array is empty we pointer swap • When a task uses its timeslice, it moves to an expired array • Next task to run: remaining task with highest priority • When all tasks have run, the expired array becomes active, start again from the front CSE 422S – Operating Systems Organization
Simple Example • Linux characterizes tasks as either compute bound or I/O bound • Compute bound • Makes heavy use of the processor, non-interactive, does not care about latency • I/O bound • Makes only sporadic use of the processor, reads/writes storage/network data, or waits for user input; cares about latency • Example (LKD pp 45) • App 1: text editor (I/O bound) • App 2: video encoder (compute bound) CSE 422S – Operating Systems Organization
Problems with O(1) Scheduler Recall O(1) philosophy: fixed timeslices for different priority levels What would timeslice allocations be for: • One video encoder (nice 19) and one text editor (nice 0)? • Two video encoder tasks? • Two text editor tasks? CSE 422S – Operating Systems Organization
Problems with O(1) Scheduler • Inverted switching rates • High priority (low nice value) tasks are generally interactive, I/O intensive • Low priority (high nice value) tasks are generally compute bound • Further consider two low priority processes – they will switch every 5 ms • Two high priority processes – they will switch every 100 ms • Additional problems? • Variance across nice intervals • Nice values of 0,1 get timeslices of 100,95 ms (5% decrease) • Nice values of 18,19 get timesliices of 10,5 ms (50% decrease) • Need absolute timeslices, limited by HW capability CSE 422S – Operating Systems Organization
Completely Fair Scheduler (CFS) Goal: All tasks receive a weighted proportion of processor time. • On a system with N tasks, each task should be promised 1/N processor time • I.e. “completely fair” • Allows interactive tasks to run at high priority while sharing CPU equally between CPU bound tasks. • Fundamental idea: • Abandons notion of fixed timeslice (and varying fairness), for fixed fairness (and varying timeslice) CSE 422S – Operating Systems Organization
Same example, but with CFS • Consider our video encoder and text editor once again • Now, rather than fixed timeslices, we need a target latency – a single absolute value that reflects how “responsive” the system should feel • e.g. 20 ms • Assume nice values of 0 and 20 • This works out to about 95% of the processor for nice 0 and 5% of the processor for nice 20 • So, timeslices would be 19 ms and 1 ms • What about two text editors? Two video encoders? CSE 422S – Operating Systems Organization
Virtual Runtime Virtual runtime: the actual running time of a process weighted by its priority, stored as nanoseconds value • If all tasks have nice priority 0, their virtual runtime is equal to their actual runtime • If some task has nonzero priority, then: where weights are determined by nice priority. • Updated in update_curr() infair.c CSE 422S – Operating Systems Organization
CFS Scheduling Operations Which task? • Picks task with lowest virtual runtime How long to run? • Keeps virtual runtime as fair as possible, so tasks get swapped out each tick • Uses minimum tick length to avoid thrashing CSE 422S – Operating Systems Organization
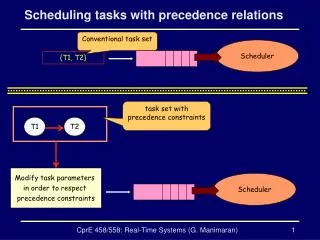
CFS Run Queue Implementation Need to pick the task with shortest virtual runtime Is there an efficient data structure that allows us to always pick the lowest value (each time)? Need to consider the cost (and frequency) of operations needed to maintain the data structure’s invariants, as well as the cost of picking CSE 422S – Operating Systems Organization
Red-Black Binary Tree CSE 422S – Operating Systems Organization
CFS Example • Consider a video encoder and a text editor Video encoder Entitled proportion: 50% Text editor Entitled proportion:50% Used Unused Over-use Actual proportion: 95% Has low priority. Actual proportion: 5% Has high priority when itwants to run. CSE 422S – Operating Systems Organization
Today’s Studio • Monitor the CFS scheduler with user-level workloads and priorities on your Raspberry Pis • Gain experience with cpu pinning, priority setting, and performance monitoring CSE 422S – Operating Systems Organization