Limited-Preemption Scheduling of Sporadic Tasks Systems
Limited-Preemption Scheduling of Sporadic Tasks Systems. RETIS Lab. Real-Time Systems Laboratory. Research Area: Real-Time Scheduling and Resource Management. Marko Bertogna. Introduction. Sporadic task system with arbitrary deadlines

Limited-Preemption Scheduling of Sporadic Tasks Systems
E N D
Presentation Transcript
Limited-Preemption Scheduling of Sporadic Tasks Systems RETIS Lab Real-Time Systems Laboratory Research Area: Real-Time Scheduling and Resource Management Marko Bertogna
Introduction • Sporadic task system with arbitrary deadlines • t= t1, t2,…, tn withti = (ei ,di ,pi) • Preemptive EDF is an optimal scheduler • Exact feasibility test: with for each , until a pseudo-polynomially far point
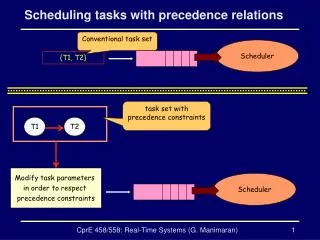
PREEMPTIVE Optimal schedulability performances Need to use protocols for the access to shared resources NON-PREEMPTIVE Higher feasibility overhead Lower run-time overhead Simplified access to shared resources To preempt or not? Ideal situation: optimal scheduling algorithm with low run-time overhead Allow preemption only when necessary for maintaining feasibility
Limited-preemption EDF • Non-preemption function Q(t) • Jobs priorities according to EDF • Two modes: regular and non-preemptive • Initially, a job JL executes in regular mode • When a higher priority job JH arrives, JL goes in non-preemptive mode JH Regular t min[cL,Q(DL - t)] DL JL Regular Non-Preemptive
Non-preemption function Q(t) • Compute Q(t) such that • Feasibility is maintained • Non-preemptive sections as large as possible • Properties of Q(t) • Monotonic non-increasing • Changes value only at time-instants corresponding to task deadlines in a synchronous periodic release sequence
Computing Q(t) • For every deadline D2, D3, …, Dm ≡ dmax : Same operations as in the EDF feasibility check:
Complexity • Pseudo-polynomial complexity • Comes for free when feasibility has to be checked as well • When storing the Q(t) table, possible to discard some value, finding suboptimal results • Very small memory requirements (from simulations) • No more than 9 points of discontinuity • Average number of 3 discontinuities
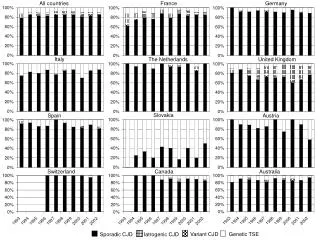
Simulations • uniform Ui • n = 5 • pi in [10,1000] • t in [0,106]
Simulations • uniform Ui • n = 10 • pi in [10,1000] • t in [0,106]
Considerations and conclusions • Optimal scheduling algorithm based on EDF • Reduced number of context changes • Small computational complexity and memory requirements • Advantages w.r.t. preemptive EDF • Lower run-time overhead • Easy way to deal with shared resources • Enhanced predictability
Marko BertognaPhD studentmarko@sssup.it RETIS Lab Real-Time Systems Laboratory Thank you