Download
1 / 15
150 likes | 280 Views
ASYMPTOTIC ESTIMATES OF ESCAPE TIME FOR LAGRANGIAN SYSTEMS. Agnessa Kovaleva Space Research Institute Russian Academy of Sciences Moscow, Russia.

E N D
ASYMPTOTIC ESTIMATES OF ESCAPE TIME FOR LAGRANGIAN SYSTEMS Agnessa Kovaleva Space Research Institute Russian Academy of Sciences Moscow, Russia
The paper presents an algorithm of exit time estimation for Lagrangian systems with linear dissipation and weak noise. The reference domain of operation is associated with the domain of attraction of a stable equilibrium in the noiseless system. Small additive noise induces small oscillations around the stable point with a very large time until escape. Large deviations theory reduces the mean exit time problem for rare escape to the minimization of the action functional and the solution of the associated Hamilton-Jacobi equation. Under some non-restrictive assumptions, the solution of the Hamilton-Jacobi equation is found in the explicit form, as transformations of kinetic and potential energy of the system. ABSTRACT
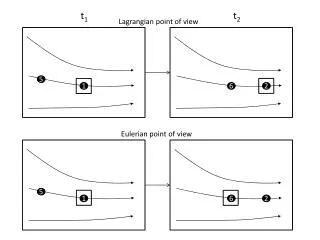
BASIC MODEL The Lagrangian equation of motion W(t) – white noise process in Rr, -nr matrix, Lagrangian L(q, q˙) = T(q, q˙) - (q, q˙), T(q, q˙) = (q˙, M(q)q˙)/2 T- kineticenergy, - potential energy. The matrices A = ΔT Δ, B, andM(q) are symmetric positive definite
The new variable(impulse) The full energy function H(q, p) (q˙,p) L(q, q˙) T(q, q˙) (q), q˙(q, p) M -1(q)p The equations of motion
ASSUMPTIONS (B.1) An admissible domain G is an open bounded set in R2n with smooth boundary ; (B.2) The function H(q,p) C2,2(G ); (B.3) There exists a unique asymptotically stable point O : (q 0, p = 0) G\ε;εisan internal ε-neighborhood of ; (B.4) All trajectories originating in Gtend to O; (B.5) The matrices A = ΔΔT, B, andM(q) are symmetric positive definite.
1. An orbit from G is attracted to a small neighborhood of O, tatt~ 1. 2. Motion evolves near O, ε~ exp(-1/ε2) – residence time 3. The system leaves G along a deterministic exit orbit – an extremal of action functional. 4. Eεis defined through the solution of the variational problem G O
THE PRECISE SOLUTION Boundary conditions: At the initial moment: t = 0, (q = q0, p = p0) intG, At the moment of escape: t = ε, (q,p) , Calculation of Eε= Vε(q0 p0 ): The asymptotic solution: Vε(q,p) = exp[S(q,p)/ε2 +….]
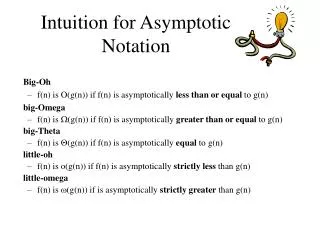
THE MEAN EXIT TIME ESTIMATE (Kushner, 1984, Wu, 2001) lim2ln (ET) inf{S(q,p)/(q,p) }S0, as →0 HAMILTON-JACOBI EQUATION(Kovaleva, 2005)
THE SOLUTION(Kovaleva, 2005) The solution is sought as Potential energy is independent of p,
THE COMPATIBILITY CONDITIONS imply restrictions to the matrix K SPECIAL CASES 1. K kIn, where In is n-th order identity matrix, k is a scalar S(q, p) kH(q, p) 2. K = diag{k1,…,kn}, 3. The linear system S(q,p) = [(p, KM 1p) (q,KCq)]/2
EXAMPLES The space constraints are in the form q GqG0.There are no particular restrictions to the impulses p. Since S(q,p) is positive definite quadratic form in p, Example 1: the linear system in an l-dimensional ellipsoid Mq˙˙+ Bq˙ + Cq = εΔW(t) Gq: (q, Lq) < 1 , : (q, Lq) 1, L is a positive definite lxl matrix
EXAMPLE 2: THE LINEAR SYSTEM IN THE PLANE q2 qi˙˙+ bqi˙ + cqi = εΔW(t), i= 1,2 G: {q12/12 + q22/22< 1}, :{q12/12 + q22/22 = 1}, 1 2 q1
EXAMPLE 3: MOTION IN A POTENTIAL TRAP (THE HENON-HEILES POTENTIAL) The equation of motion: Potential ∏(q1,q2) = (q12 + q22 + 2q12q2 - 2q23/3)/2
The equipotential curves (q1, q2) = const < 1/6 the equality (q1, q2) = 1/6 determines the separatrix in the projection on the plane. The admissible domain: Gq: { (q1, q2) < 1/6}, q: { (q1, q2) = 1/6} The mean escape time asymptotics: limε→∞[lnε2(ETε)]= min[k (q1, q2)] =b/ 6σ2
Conclusions Theory of large deviations is applied to the problem of escape from the reference domain for a weakly perturbed Lagrangian system. Formally, the system is interpreted as a nonlinear stochastic degenerate system. The techniques employed involve the reduction of the escape problem to a deterministic variational problem for the action functional, and the solution of an associated Hamilton-Jacobi equation. It is shown that, under broad conditions, the solution can be found in the closed form, and the mean escape time can be defined as a function of the system and noise parameters.