Download
1 / 28
280 likes | 381 Views
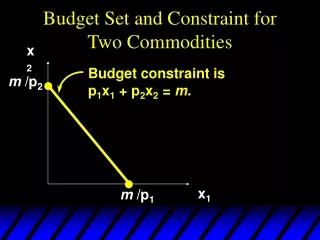
This workshop explores set-constraints modeling and efficiency in constraint programming. Discover filtering algorithms, bounds consistency, and applications such as the Schur Number problem. Learn how set constraints can reduce memory requirements and improve efficiency.

E N D
Two Set-Constraints For Modeling and Efficiency Willem-Jan van Hoeve Ashish Sabharwal Carnegie Mellon Univ.Cornell Univ. ModRef workshop at CP-07 Sept 23, 2007
CSPs, Global Constraints CSP: Given variables x, y, z, … with domains D(x), D(y), D(z), … and constraints over variables, find variable values such that all constraints are satisfied. Typical single-valued variable domains: discrete or continuous sets, e.g. {1,2,3,4,5}, {Su,Mo,Tu,…,Sa}, [0,1] Key to the success of CP: many useful global constraints with efficient, non-trivial filtering/propagation • Very different from, say, SAT or integer programming ModRef Workshop at CP-07
Constraints on Set Variables Set variable: domain values are sets E.g. domain(S) = {{1,2}, {1,3},{2,3},{1,2,3}} Arise naturally in many settings, e.g.A graph (V,E) is a set of vertices and a set of edges(representation of Dooms-Katriel ’06 for MST) A set of jobs to be scheduled on a set of machinesA set of packages to be moved using a set of trucks Often “grounded-down” to single-valued variables,especially in SAT and integer programming ModRef Workshop at CP-07
Set Variables: The Challenge A constraint on a single set variable may capture a structure that must otherwise be represented by a global constraint on multiple single-valued variables • Filtering constraints on a singleset may be as complex as global filtering on multiple single-valued variables Known that combining two overlapping global constraints can easily make them NP-complete • Implication: constraints on multiple set variables can be significantly harder to filter ModRef Workshop at CP-07
Our Contribution Efficient filtering algorithms establishing bounds consistency for set-constraints sum-free, pair-atmost1 Experiments with the Schur Number problem and the Social Golfer problem Message: in addition to providing modeling convenience, set constraints can help • Significantly reduce memory requirements • Increase efficiency through better filtering ModRef Workshop at CP-07
Constraints, Filtering, Propagation • Variables x, y, z, … with domains D(x), D(y), D(z), …E.g. D(x) = {1,2,3,4,5} • Constraints: e.g. x < max(y,z), yz, alldiff(x,y,z), … • Key step in constraint programming: Filtering • Given current variable domains and constraint C, remove domain values that do not belong to any solution to C • Note: considers C in isolation, thus not too difficult • Domain-delta(x) : change in D(x) between two successive filtering events ModRef Workshop at CP-07
Good Filtering Algorithm • Is efficient: usually called at every node of the search tree where relevant domains changed • Makes C domain consistent: provably removes all variable values that do not belong to a solution to C -- all remaining values can be extended to a solution • Is incremental: re-uses computation from parent nodes in the search tree, e.g., thru domain-deltas Goal: find efficient (near-linear time), incremental filtering algorithms that achieve domain consistency ModRef Workshop at CP-07
Set Variables: Representation If elements of S come, e.g., from {1, 2, …, k}, |D(S)| = 2k • Naïve domain representation too costly “Interval” representation: [L(S), U(S)] • Semantics: D(S) = {s | L(S) s U(S)} E.g. L(S) = {2,3}, U(S) = {1,…,k} \ {5} all subsets containing 2 and 3 but not 5 • All elements of L(S) must be in S --- lower bound No element not in U(S) may be in S --- upper bound • Domain-delta: provides L(S) and U(S) (Alternative: length-lex representation) ModRef Workshop at CP-07
Bounds Consistency Consistency notion for constraints on set variables(using the interval representation) : C(S1, S2, …, Sn) is bounds consistent if • x L(Si) iff x Si for all solutions to C • x U(Si) iff x Si for some solution to C • Note: L(Si) and U(Si) themselves may not satisfy C • Partial filtering: no bounds consistency Goal: establish bounds consistency efficiently “roughly speaking” ModRef Workshop at CP-07
Part 1: The sum-free constraint Application: The Schur Number problem Filtering algorithm: fairly straightforward Advantage: natural model enormous space savings! can solve problems couldn’t be modeled in 2GB
sum-free(S) Variable : set S with positive integer elements Constraint: i, j S i+j S Note: j may equal i, so that i S 2i S Filtering algorithm, establishing bounds consistency: for i L(S), for j L(S) remove i+j and |ij| from U(S) Amortizedcomplexity: O(n2) for any path from root to leaf (assuming linear-time element listing for L(S) and L(S), and constant-time deletion for U(S) ) ModRef Workshop at CP-07
Experiments: Schur Number Given k 0, Schur number of k is the largest integer n s.t. {1, 2, …, n} can be partitioned into k sum-free subsets. Decision problem: given k, n, is such a partition possible? Model #1: integer vars x1, …, xn with domain [k] • O(kn2) constraints: (xi = s) and (xj = s) (xi+j s) Model #2: set vars S1, …, Sk with domain [, [n]] • k+1 constraints: isum-free(Si), partition(S1,…,Sk, [n]) • Also added shadow integer vars of Model #1 to better control the search heuristic {1, …, k} ModRef Workshop at CP-07
Experiments: Schur Number schur-k-n Significantly reduced memory requirement (esp. n > 500) Often 4x speed-up Using ILOG Solver 6.3 ModRef Workshop at CP-07
Part 2: The atmost1 constraint Application: The Social Golfer problem Filtering algorithm: in general: complete filtering NP-hard (known) for pair-atmost1: constant time algorithm (after preprocessing) Advantage: efficiency thru better filtering
atmost1(S1, …, Sn, c1, …, cn) [Sadler-Gervet ’01] Variables: • Sets S1, S2, …, Snsets of integers • Integers c1, c2, …, cncardinalities Constraints: • |Si| = ci1 ≤ i ≤ n • |Si Sj| ≤ 1 1 ≤ i < j ≤ n Example: D(S1) = [{1,2}, {1,2,3,5,6}], D(S2) = [{3}, {1,2,3,4}], |S1| = |S2| = c1 = c2 = 3 (“softer alldifferent”) Solutions:S1 = {1,2,5} or {1,2,6}S2 = {1,3,4} or {2,3,4} ModRef Workshop at CP-07
Filtering atmost1 • NP-complete in general[Bessiere-Hebrard-Hnich-Walsh ’04] • Poly-time partial filtering algorithm known[Sadler-Gervet ’01] • Achieves partial filtering even for atmost1(S1,S2,c1,c2) How hard is the problem for two sets, i.e. pair-atmost1? • We propose BC-FilterPairAtmost1 for bounds consistency • Uses somewhat complex data structures and reasoning • But eventual filtering steps very simple! ModRef Workshop at CP-07
pair-atmost1: Standard Decomposition Implement as three separate standard set constraints: |S1| = c1, |S2| = c2, |S1 S2| ≤ 1 Disadvantage: • Treats cardinality and intersection constraints separately • Does not achieve bounds consistency(e.g. no element ever added to L(Si) ) Example: D(S1) = [{1,2}, {1,2,3,5,6}], D(S2) = [{3}, {1,2,3,4}], ci = 3 • Standard decomposition does not filter anything • However, could have concluded 4 L(S2) and 3 U(S1) ModRef Workshop at CP-07
pair-atmost1: Bounds Consistency • L1 : elements already in S1 • U1 : elements available to be added to S1 S1 : L1 = L(S1) U1 = U(S1) \ L(S1) S2 : L2 = L(S2) U2 = U(S2) \ L(S2) ModRef Workshop at CP-07
Partitioning into Classes 9 classes of elements • E.g. if x U1L2 must be removed from U(S1) then all y U1L2 must be removed from U(S1) • Need to process only a constant number of classes!Options: add class to L(Si) or remove class from U(Si) S1 : L1L2 L1rest U1L2 U1U2 U1only = S2 : L1L2 L2rest U2L1 U2U1 U2only Key observation: all elements within a classare indistinguishable w.r.t. pair-atmost1 ModRef Workshop at CP-07
The Filtering Process Implicitly go thru every “kind” of solution, maintaining two flags for each class T: • T.can-have : solution with some x T in Si • T.not-necessary : solution without needing all of T in Si • Initialize flags to False • Implicitly process all solutions • If T.can-have is still False, remove T from U(Si) • If T.not-necessary is still False, add T to L(Si) (typo on page 7 of paper) ModRef Workshop at CP-07
Updating Flags: “Case0” Case0: S1 and S2 do not share any element (other cases easily reduce to Case0 on a smaller problem) • Note: cannot use elements from U1L2 and U2L1 • Compute “slacks” • slack1 = (|U1only| + |U1U2|) (c1 |L1|) • Similarly slack2 • slack3 = (|U1only|+|U2only|+|U1U2|) (c1+c2 |L1|+|L2|) elements needed elements available ModRef Workshop at CP-07
Updating Flags: “Case0” If solution exists, • it can always use U1only, U2only (never hurts) • it cannot use U1L2, U2L1 at all (no shared elements) Therefore, set • U1only.can-have = True U2only.can-have = True • U1L2.not-necessary = True U2L1.not-necessary = True Further, e.g., if slack1 > 0, • U2U1.can-have = True U1U2.not-necessary = True (A few other similar updates.) There exists a solution in Case0 iffslack1 0, slack2 0, and slack3 0 ModRef Workshop at CP-07
BC-FilterPairAtmost1 Processing 9 classes takes constant time • Don’t need all elements of U1L2, etc. --- only their cardinalities and a representative element! • Eventual filtering of elements, of course, takes time proportional to class size Filtering complexity: O(n + k log n) • n : integer domain size of elements • k : #elements added to L(Si) or removed from U(Si) Stronger amortized analysis using domain-deltas: • O(n log n) combined for any path from root to leaf ModRef Workshop at CP-07
Experiments: Social Golfer golf-g-s-w: for each of wweeks, partition n golfers into ggroups of sizes each (gs = n), such that no two golfers are in the same group more than once Example: 1 2 3 4 5 6 7 8 9 week 1 1 4 7 2 5 8 3 6 9 week 2 1 5 9 2 6 7 3 4 8 week 3 Well-studied problem: surprisingly challenging! • Techniques based on symmetry, local search • Our work: orthogonal to these --- improve basic filtering [prob010 in CSPLib] ModRef Workshop at CP-07
Set-Based Model One set variable for each group Sij (week i, group j) Constraints: partition(Si1, Si2, …, Sig, [n]) week i atmost1(Sij, Skl, s, s) weeks ik; groups j,l For efficiency, we also have shadow integer variables xia with domain [g] for each week i and golfer a • Use xia’s to control search strategy • Add a redundant global cardinality constraint (gcc): each group in [g] must be assigned to exactly s xia’s ModRef Workshop at CP-07
Results: Social Golfer ModRef Workshop at CP-07 Using ILOG Solver 6.3
Conclusion • Discussed sum-free(S) and pair-atmost1(S1,S2,c1,c2) • Results generalize to atmostk and to k sets, for constant k • Demonstrated that set constraints not only offer convenience in modeling, they can also • Significantly reduce memory requirements • Provide much faster solutions • Observed that efficiently filtering set constraints to bounds consistency can be somewhat tricky, but does pay off ModRef Workshop at CP-07