Hierarchical Occlusion Map
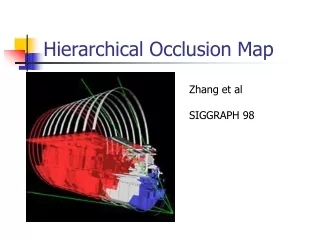
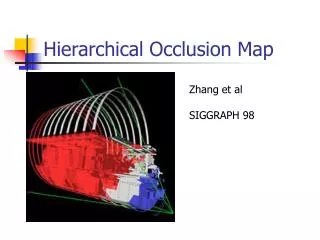
Hierarchical Occlusion Map . Zhang et al SIGGRAPH 98. Basic Ideas. Choose a set of graphics objects from the scene as Occluder Use the occluder to define Occlusion Map (hierarchically) Compare the rest of scene against the occlusion map . Example. Blue: Occluders Red: Occludees.

Hierarchical Occlusion Map
E N D
Presentation Transcript
Hierarchical Occlusion Map Zhang et al SIGGRAPH 98
Basic Ideas • Choose a set of graphics objects from the scene as Occluder • Use the occluder to define Occlusion Map (hierarchically) • Compare the rest of scene against the occlusion map
Example Blue: Occluders Red: Occludees
Occluder Viewing Frustum Occluder Rendering Database Culling Selection Build Occlusion Map Hierarchy Real Viewing Frustum Occlusion Test Scene Culling Algorithm Pipeline
2-Step Occlusion Test • Overlap Test • Overlap Test Overlap + Depth = Occlusion
Why decomposition? • The occlusion test is done approximately (conservatively) • We can afford to be more conservative in depth test than overlap test
Overlap Test – Occlusion Map • Representation of projection for overlap test: occlusion map • A gray scale image – each pixel represents one block of screen region • Generate by rendering occluders
Occlusion Map (OM) • Each pixel of the occlusion map has an opacity, which represents the ratio of the sum of the opaque areas in the block to the total area. • If fully covered, p= 1, if anti-alised pixel, p <1) • Occlusion map: the alpha channel of an image
Overlap Test using OM For each potential occludee, we can scan-convert it and compare against the opacity of the pixels it overlaps Expensive!! • Conservative Approximation: use the screen-space • bounding box of the occludee (a superset of the actual • covered pixels) • If all the pixels inside the bounding box are opaque, • the object is occluded.
Hierarchical Occlusion Map Like hierarchical Z-buffer, we can create a hierachy to speed up the comparison (for large objects) The low resolution pixel is an average of the high resolution pixels
Overlap Test using HOM Basic Algorithm • Start from the lowest resolution • If the pixel cover the bounding • rectangle has a value 1, • the object is occluded • Otherwise traverse down the • hierarchy: • If all children =1: occluded • If all children =0; not occluded • Otherwise, traverse down further
Approximate Overlap Test • Instead of concluding an object is occluded only when the bounding box is within pixels with opacity 1, we can use an threshold between [0,1] • Early termination in the high level of the hierarchy • What does it mean when a block has high opacity but not one? This is the unique feature of HOM !!
Depth Test (1) Approximate Z (depth) test: • A single Z Plane A single Z plane to separate the occluders from occludees.
Depth Test (2) • Break the screen into small regions • Build at each frame • Instead of using Z-buffer, use • the occluder’s bounding • volume’s farthest Z • Compare each potential • occludee’s nearest Z (con- • servative test)
Occluder Selection Ideal occluder: the visible objects – it’s a joke View-dependent occluder: too expensive (m^6 log m) – Wow! Solution: Estimate and build an occluder database Discard objects that do not server as good occluders
Occluder Selection (2) • Size: not too small • Redundant: detail polygons (clock on the wall) • Complexity: Complex polygons are not preferred (why?) • Done at run time – sort the occluders in depth, add them in order until reach the polygon count.
Discussion • Robust • Very little assumption about hardware • Need high depth complexity • Adpative occlusion culling
Hardware Support • Most of the aforementioned algorithms need to be done by applications (software) • Hardware support is emerging – • Example HP Visualize fx board (1997)
HP hardware occlusion • Extend the OpenGL – add a OCCLUSION_MODE • The bounding box of an object is scan converted first • A flag is set if any pixel of the BB faces is visible • Only need to read back one flag, instead of the entire frame buffer • Tradeoff – valueable rendering time is used to render useless BB faces (need to be used wisely) • Reportedly 25%-100% speedup were observed