Download
1 / 57
570 likes | 698 Views
Transportable Manned and Robotic Digital Geophysical Mapping (DGM) Tow Vehicle. Scott Millhouse, PE U.S. Army Corps of Engineers Engineering and Support Center Huntsville. Project Description- Technical Description of Proposed Technology.

E N D
Transportable Manned and Robotic Digital Geophysical Mapping (DGM) Tow Vehicle Scott Millhouse, PE U.S. Army Corps of Engineers Engineering and Support Center Huntsville
Project Description- Technical Description of Proposed Technology • Objective: integrate an innovative robotic tow vehicle with industry standard DGN sensors & advanced geo-location positioning to autonomously map target areas. • Phase I: focus on integration & path following to precisely replicate target coverage for multiple runs with multiple sensors. Objective is to centimeter level. • Phase II: focus on challenging site conditions requiring obstacle recognition & avoidance with a secondary positioning system to maintain path when the primary positioning system is shadowed.
Proposed Robotic Solution Segway Robotic Mobility Platform (RMP) Proven battery powered commercial people mover can be robotically controlled as autonomous, semi-autonomous or tele-operated vehicle. Over 45 platforms currently deployed for robotics development with many for DARPA military mission development. Segway RMP 200 and 400
Segway tow vehicle • Two wheel manned and robotic- self balance using gyroscopic sensors. • Input/0utput pulse at 100 hz • Wheels individually electrically driven (2 HP sustained each to 5 peak each)
Control Interface RMP provides transportation (turn, steering) to a higher level system that performs the navigation task CANbus is already part of Segway HT architecture for communications to user interface Commands and data are exchanged on CANbus with a high level controller (uP, PCMCIA etc.) Two control modes: Tractor (no stabilization) Balance (Dynamically stabilized) Robotic Control
Commands Speed Turn rate E-stop Controller mode Gain mode CANbus & USB Communication • Data • Pitch Angle • Pitch Rate • Roll Angle • Roll Rate • Wheel Speeds • Wheel motor currents • Integrated wheel positions (All data at 100 Hz)
Laptop rmi_demo rmi_joy Laptop Vector CANCardX WL110 Wireless WL110 Wireless Network Card Network Card Teleoperation Example
Phase I PositioningArcSecond Triad “Indoor GPS” • 40 hz 3D positioning with attitude (roll, pitch, yaw, rotation) • Sub-centimeter accuracy (independently proven by recent AETC testing) • Unit on DGM sensor plus on tow vehicle to adjust for varying lever arm.
Project Description- Technical description of proposed technology • Clearly explain the methodology involved in the demonstration, and the DEM/VAL issue. • If the demonstration involves multiple technology components, clearly specify the DEM/VAL technology issue. • Provide technical details regarding the proposed method. • Identify and discuss technical risks
Demonstrate capability of : Tele-operation of the Segway tow vehicle/DGM trailer system Video feedback Remote control Autonomous path following in an obstacle-free environment Proposed Phase I
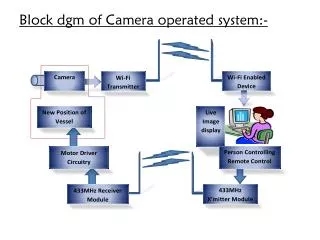
Video feedback Low cost video camera Mounted on controllable pan/tilt platform GUI for Segway driving commands Implemented in Visual Basic Interfaces to Segway CANbus communications Teleoperation by remote access of Segway computer desktop via 802.11b/g network Phase I - Teleoperation
Position sensing infrared laser beacons network system Navigation/steering control Adapt from Auburn Univ. Grand Challenge experience Obstacle fee environment Develop “standard” for later comparisons Phase I – Autonomous Tracking
Autonomous navigation over challenging site Larger area Temporary loss of primary sensor Obstacle detection and avoidance Proposed Phase II
Autonomous navigation over challenging site GPS complemented by inertial measurement Proven experience Also investigate other sensing Electronic compass, LIDAR mapping Simultaneous Location and Mapping Also investigate other complements Tracking image on far horizon (like driving a car) Phase II - Navigation
Sensing Combination of LIDAR/ultrasound/image analysis LIDAR good for long range Combination of other sensors for short range Path adaptation Map the detected obstacles in near field Move waypoints as needed to avoid mapped obstacles Phase II – Obstacle Avoidance
Project Description- Method for verifying technology • Specific controls. • Monitoring approach. • Mass-balance issues
Project Description- Evidence of technical maturity • Brief description of previous, related demonstrations. • Data justifying the expected performance.
Pre-project Geonics EM-61 Testing Static and Dynamic testing shows no effect to the EM at a 2 m distance from rear of HT to center of coil
Pre-Project Geometrics G-858 Magnetometer Testing run in the gradiometer mode with the HT effecting the instrument at 1 m statically and 2 m dynamically from center to HT. Conclusion: Use a 2 m separation from center of sensors to rear of HT.
Pre-Project DGM mapping test • Details of composite tow bar & non-metallic components. 2 m tow bar, equipment and data display
Pre-Project DGM mapping test • Proof of concept- EM-61 integrated and towed to map McKinley Range Grid 1 • No Segway interference to sensor- results exactly as by man towed • 3 hours mapping in 8-12” field grass
AU Tele-operated Vehicle Low cost web-cam, 802.11b wireless communication
PROJECT DESCRIPTION Technical Description of Technology • 2004 DARPA Grand Challenge • SciAutonics, LLC and Auburn University team vehicle • 4-wheel drive ATV • AU developed controls • Navigation (EKF) • Steering • Throttle
GPS/IMU Complement • The combination provides a high update rate, • low noise, unbiased measurement solution
Other Relevant Experience • Cm-level control for row crops • Reduced overlap for tillage • Cooperating Vehicles
Tractor System Dynamic Model Includes “lever arm” correction
Experimental Results • Implement tracking
Dead reckoning navigation (no GPS) Experiments up to 4 minutes Vehicle dynamics, modeling, control Extended Kalman Filters for various sensor complements Ultrasonic location Optical flow research More AU Experience
Project Description- Approach for obtaining cost and performance data for validation of proposed technology • Most critical is data on life-cycle cost advantage over current approaches .
Proposed location for demonstration and/or approach for selection of demonstration site. • Reasons for and implications of this choice
Expected DoD Benefit • Provide realistic cost comparisons with similar and current approaches. • Include operational, management, and capital costs.
Describe the anticipated payback for the proposed technology. Estimate the payback for implementation at an individual site and across DoD in terms of reduced cost and environmental risk. Expected DoD Benefit
Identify the extent of the DoD problem and specify other Services’ explicit involvement. Number of potential sites within DoD. Expected DoD Benefit
Provide milestone descriptions for the duration of the project and the expected contracting schedule. Provide current estimates for funding requirements per fiscal year. Provide breakout by performer and major task. If other sources of funding are expected or will be leveraged, describe their status and the role of the requested ESTCP funding. Project Milestones and Funding Profile
Identify technology transfer plans within and across Services and proposed mechanisms to facilitate technology transfer (presentations and symposia are not sufficient). Identify specific DoD end-use customers across DoD components. Describe the approach for obtaining DoD and regulatory acceptance. Transition Plan
Provide evidence of commitment for demo facilities involved. Describe the responsibilities of team members and their expected funding allotments. Performers
????? PROJECT DESCRIPTION Issues of concern and risks for field testing
???? PROJECT DESCRIPTION Approach for determining performance
Productivity and costs will be compared to traditional ground based methodologies. The labor, rental and equipment saving will be equated to dollars. Operating costs, maintenance and repair of the RMP will be estimated based upon field experience.The vehicle cost will be amortized over a 3 year period based upon 1000 hrs of yearly use with no residual value. These costs will be summed into an hourly rate comparable to the helicopter rental rate. PROJECT DESCRIPTION Approach for determining costs
Pre-Proposal effort Done Phase I: Develop plans and acquire vehicle Months 1-3 Initial test and modify vehicle Month 4-5 System Development Months 5-6 Perform validation testing Month 7 Report Findings Month 8 Go/No Go Decision Month 9 Phase II (Optional): Technology Study Months 10-11 Technology Development Month 10-18 Perform demos at a project site Month 18-19 Create Reports Months 20-22 Schedule
Pre-Proposal- Equipment & Testing by USAESCH $20k Phase I: USAESCH management and technology development $22k Workplan $10k Equipment/ base Segway XT, tow bar system, RMP, and PC $60k Modification to the ArcSecond Triad Position system $9k Writing and testing path following command software (Auburn U) $54k Initial testing and modification $12k APG demonstration at the Calibration Area with EM-61 and G-858 $15k Phase I Reporting $15k IPR and Environmental Conference $10k Donation by USAESCH -$15k Total Phase I $192,333 Current Funding Estimates
Phase II (Optional): USAESCH management, reporting, development $40k Workplan $10k Obstacle avoidance and position augmentation $162k Initial testing and modification $15k Active Site demonstration production mapping $35k Phase II Reporting $20k IPR and Environmental Conference $10k Subtotal Phase II $292,328 Total Phase I and II $484,660 SCHEDULE AND FUNDING PROFILE Current Funding Estimates
Phase I will use the APG Calibration Lanes after validation testing at Auburn and McKinley Range Phase II is planned for a FUDS site of opportunity. As an alternative APG and/or YPG could be used. We desire a more challenging site with terrain, view obstructions and obstacles PROJECT PERFORMERS Commitment from Demonstration Facility
CEHNC PI, Management, reporting, technology development, testing and modifications for all Phases Field Support QA Auburn Phase I Path following, field testing and reporting Phase II system integration, software, field testing, reporting PROJECT PERFORMERS Team Member Responsibilities
Phase I CEHNC; labor, materials etc. $138k Auburn University $54k Phase II CEHNC; labor, materials etc. $202k Auburn University $90k PROJECT PERFORMERS Team Member Funding Allotments
“Please elaborate on the proposed uses and concept of operation for this tow vehicle. Discuss potential terrain and vegetation limitations that could be encountered. The Program Office is concerned that the applicability for this technology will be limited to only a fraction of the sites where man-portable systems are required.” Review Comments