requisite technologies
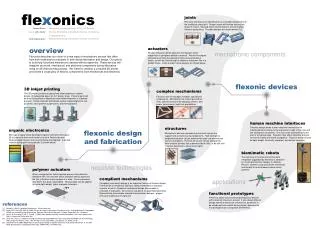
fle x onics. Jeremy Risner. Bioengineering Graduate Group, UCSF / UC Berkeley. advisor John Canny. Electrical Engineering and Computer Science, UC Berkeley. in collaboration with. Vivek Subramanian. Electrical Engineering and Computer Science, UC Berkeley. overview.

requisite technologies
E N D
Presentation Transcript
flexonics Jeremy Risner Bioengineering Graduate Group, UCSF / UC Berkeley advisor John Canny Electrical Engineering and Computer Science, UC Berkeley in collaboration with Vivek Subramanian Electrical Engineering and Computer Science, UC Berkeley overview Flexonics describes our vision of a new class of mechatronic devices that differ from their traditional counterparts in both device fabrication and design. Our goal is to build fully functional mechatronic devices without assembly. These devices will integrate structural, mechanical, and electronic components during fabrication using an all inkjet printing process. We intend to develop a complete 3D printer, and create a vocabulary of flexonic components (both mechanical and electronic). 3D inkjet printing The 3D printer consists of specialized inkjet dispensers (shown below) [4] suspended above an X-Y planar stage. Flexonic parts will be built using selective deposition of printable materials in a layered process. These materials will include solution-based oligomers and polymers, nano-particle suspensions, and thermoplastics. human machine interfaces Flexonic design allows human-machine interfaces to be individualized according to the ergonomic needs of the user and the workspace constraints. The user could essentially become part of the design loop. Flexonics also offers attractive features for human safety and social acceptance. Flexonic devices would be light-weight, inherently compliant, and almost noiseless. organic electronics We hope to apply newly developed organic electronic techniques [5] to create the drive and control circuits of flexonic devices. Inkjet printable devices are currently being investigated. A printed inductor using gold nano-particles is shown below. biomimetic robots The high level of functional and structural integration suggested by flexonics is attractive for creating biomimetic designs in robotics. Flexonic systems could provide the multimodal functionality of muscle-based natural motor systems. polymer actuators compliant mechanisms When a large electric field is applied across a thin dielectric elastomer film, the resultant stress (Maxwell stress) squeezes the film in thickness and expands it in area. Linear expansion over 300% has been reported [3]. This principle can be applied to create light weight, highly energetic actuators. Compliant mechanism design is an important feature of flexonic design. There will be no traditional sliding or rolling movements in actuators, sensors, or joints. Compliant mechanism design also enables a reduction in total parts: we envision one-piece, no assembly fabrication. Shown below are example compliant mechanisms designs: gripper (left) and rotational joint (right) [1]. functional prototypes Flexonics allows fully functional prototypes to be built with extremely short turn-around. It also allows different design elements (electrical, mechanical, aesthetic) to be combined much earlier during design, because the first prototypes can incorporate all elements. V+ joints Flexonics will require the identification of a suitable replacement for the traditional rotary joint. Design issues will include maximizing range of motion, reducing stress concentrations, and controlling inherent spring force. Possible designs are shown below [1,2]. actuators mechatronic components Flexonic actuation will be based on the Maxwell stress imposed on a compliant dielectric material. We will investigate methods for printing the elastomer films and electrodes in stacks, as well as constraining the dielectric elastomer film in a flexible frame. Initial actuator frame designs are shown below. flexonic devices complex mechanisms Flexonics also encourages complex, specialized components. Mechanisms for motion generation (left), specific functions like gripping (center), and power transmission (right) are possibilities. structures flexonic design and fabrication Mechatronic devices need passive structural volumes to support and connect moving components. High strength-to-weight performance can be achieved through one-dimensional trusses and lattices. Flexonic structures can be designed to have uniform stiffness like a diamond lattice (left), or be stiff only in certain directions to allow shear (right). requisite technologies applications references [1] Howell LL (2001) Compliant Mechanisms. Wiley, New York [2] Moon YM, Trease BP, Kota S (2002) Design of Large-Displacement Compliant Joints. To be published in Proceedings, ASME International Design Engineering Technical Conference, Montreal, Canada, September 29 – October 2 [3] Pelrine R, Kornbluh R, Pei Q, Joseph J (2000) High-speed electrically actuated elastomers with strain greater than 100%. Science 287(5454):836-839 [4] Shah VG, Hayes DJ (2002) Trimming and Printing of Embedded Resistors Using Demand-Mode Ink-Jet Technology and Conductive Polymer. Proc., IPC Printed Circuits Expo 2002, Long Beach, CA, March 24-28 [5] Subramanian V (2000) Applications of printing technology in organic electronics and display fabrication. In The Half Moon Bay Maskless Lithography Workshop, DARPA/SRC, Half Moon Bay