Download
1 / 11

E N D
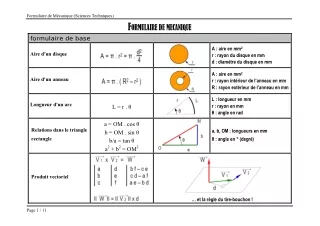
Formulaire de Mécanique (Sciences Techniques) FORMULAIRE DE MECANIQUE formulaire de base A : aire en mm2 r : rayon du disque en mm d : diamètre du disque en mm Aire d'un disque A : aire en mm2 r : rayon intérieur de l’anneau en mm R : rayon extérieur de l’anneau en mm Aire d'un anneau L : longueur en mm r : rayon en mm θ : angle en rad Longueur d'un arc L = r . θ a = OM . cos θ b = OM . sin θ b/a = tan θ a2 + b2 = OM2 Relations dans le triangle a, b, OM : longueurs en mm θ : angle en ° (degré) rectangle Produit vectoriel … et la règle du tire-bouchon ! Page 1 / 11
Formulaire de Mécanique (Sciences Techniques) P : poids en N m : masse en kg g : accélération de la pesanteur en m/s2 p : pression en MPa (N/mm2) F : force en N S : surface pressée en mm2 k : raideur du ressort en N/mm F : force appliquée en N f : flèche* du ressort en mm * différence entre sa longueur initiale et sa longueur sous charge P = m.g Poids d'une masse F P = Pression S F k = Raideur d'un ressort f T : "force de frottement" (ou composante tangentielle) en N N : composante normale en N f : facteur de frottement (sans unité) avec f = tgφ T = N . f Frottement S tatique Théorème de la résultante statique Pour un système matériel isolé Principe fondamental de la statique Tous les moments des résultantes appliquées au système matériel isolé doivent être définis au même point (B) Théorème du moment statique Changement de point d'expression d'un moment Page 2 / 11
Formulaire de Mécanique (Sciences Techniques) Cinématique I1/0 représente le CIR du mouvement de 1/0 Mouvement plan Autrement dit,V = r . ω pour un mouvement de rotation circulaire T ransmission de puissanc e Disque d’embrayage Ct : couple transmissible en N.mm r:rayon intérieur de garniture en mm R: rayon extérieur de garniture en mm n: nombre de contacts f: facteur de frottement (sans unité) Couple transmissible par friction (embrayage, limiteur de couple, …) ⎛ ⎞ r − 3 3 2 R r ⎜⎜ ⎝ ⎟⎟ ⎠ = C .n. F .f. t − 2 2 3 R r r : rapport de réduction Ni : fréquence de rotation en tr/min c : nombre de contacts extérieurs z : nombre de dents Zmenantes sortie N = = ) 1 − c. r ( Rapport de réduction Zmenées entrée N Z d N n : fréquence de rotation en tr/min z : nombre de dents d : diamètre de poulie ou diamètre de roue en mm m : module de denture en mm = = 1 2 2 Transmission par courroie et transmission par engrenage Z d N avecd = m . z 2 1 1 la dernière égalité (= d2/d1) n'est pas valable pour les couples roue + vis sans fin Page 3 / 11
Formulaire de Mécanique (Sciences Techniques) 1 s : déplacement de l'écrou en mm p : pas de vis en mm ( par tour ), θ : angle de rotation de la vis en rad v : vitesse linéaire de l'écrou en mm/s N : fréquence de rotation en tr/min s = p.θ. Principe vis-écrou (rotation de vis provoquantune translation d'écrou) 2.π N V = p. 60 C : course du piston (translation) en mm e : excentration de la manivelle (rotation) en mm Principe bielle- manivelle (réversible) C = 2 . e s : déplacement de la crémaillère en mm r : rayon primitif du pignon en mm θ : angle de rotation du pignon en rad v : vitesse linéaire de la crémaillère en mm/s ω : vitesse angulaire du pignon en rad/s Principe pignon- crémaillère (réversible) s = r . θ v = r . ω r W V Principe came excentrique - poussoir (non réversible) (rotation de came provoquant une translation de poussoir) C : course du poussoir (translation) en mm e : excentration de la came (rotation) en mm C = 2 . e Page 4 / 11
Formulaire de Mécanique (Sciences Techniques) P : puissance en W F : force en N v : vitesse linéaire en m/s P : puissance en W C : couple en N.m ω : vitesse angulaire en rad/s Psortie : Puissance de Sortie en W Pentrée : Puissance d’entrée en W Putile : Puissance utile W Pabsorbée : Puissance absorbée en W Puissance relative à un mouvement de translation P = F . V P = C . ω Puissance relative à un mouvement de rotation Rendement Guidage en Rotation A cause des risques d’échauffem ent, cette solution est à réserver aux dom aines suivants : - Faibles vitesses ; - Efforts transmissibles peu élevés. Les ajustements possibles (Ex) Guidage par contact direct H7/e7 - H8/e8 - H6/f6 - H7/f7 - H8/f7 - H6/g5 - H7/g6 . . . Le principe du contact direct est am élioré en interposant des bagues de frottem ent qui vont : - Dim inuer le coefficient de frottem ent ; - Augm enter la durée de vie de l’arbre et du logem ent ; - Dim inuer le bruit ; - Reporter l’usure sur les bagues. Diamètre extérieur Guidage par interposition de bagues de frottement (Coussinet) H7/p6 Diamètre intérieur H7/f7 Page 5 / 11
Formulaire de Mécanique (Sciences Techniques) ARBRETOURNANT PAR RAPPORT A LA CHARGE Les Ajustements : Les bagues intérieures tournantes sont m ontées SERREES: Tolérance de l’arbre : k6 Les bagues extérieures fixes sont m ontéesGLISSANTES : Tolérance de l’alésage : H7 En rem plaçant le frottement par glissement par du Guidage en rotation par roulements à billes à contact radial (type BC) roulement, on dim inue (la régosité de porte de roulement Ra=0,8) la puissance absorbée. ALESAGE(MOYEU)TOURNANT PAR Le rendem ent du RAPPORT A LA CHARGE guidage en rotation est Les Ajustements : Les bagues intérieures fixes sont m ontées GLISSANTES : Tolérance de l’arbre : g6 Les bagues extérieures tournantes sont m ontées SERREES : Tolérance de l’alésage : N7 (la régosité de porte de roulement Ra=0,8) donc m eilleur. Page 6 / 11
Formulaire de Mécanique (Sciences Techniques) ARBRETOURNANT PAR RAPPORT A LA CHARGE MONTAGE DIRECTE EN ‘X’ Ajustements : Les bagues intérieures tournantes sont m ontées SERREES : Tolérance de l’arbre : m6 Les bagues extérieures fixes sont m ontées GLISSANTES : Tolérance de l’alésage : H7 (la régosité de porte de roulement Ra=0,8) Ces roulem ents supportent des charges Guidage en rotation par roulements à contact obliques (types KB et BT) axiales relativem ent ALESAGE(MOYEU)TOURNANT im portantes et des charges axiales et PAR RAPPORT A LA CHARGE MONTAGE radiales com binées. INDIRECTE EN ‘O’ Ajustements : Les bagues intérieures fixes sont m ontées GLISSANTES : Tolérance de l’arbre : f6 Les bagues extérieures tournantes sont m ontées SERREES : Tolérance de l’alésage : N7 (la régosité de porte de roulement Ra=0,8) Page 7 / 11
Formulaire de Mécanique (Sciences Techniques) - Le m ontage en «O» s'em ploie aussi avec les arbres tournants lorsque les organes de transm ission sont situés en dehors de la Cas Particulier pour un guidage en rotation par roulements à contact obliques (types KB et BT) liaison (engrenages en porte à faux). - Le réglage du jeu interne est réalisé sur la bague intérieure du roulem ent qui est à gauche (Ø... h6) par l’écrou à encoches. Exemple de montage Conditions de montage Joints à lèvres à frottement radial Page 8 / 11
Formulaire de Mécanique (Sciences Techniques) Les Engrenages Engrenages cylindriques à denture droite Engrenages cylindriques à denture hélicoïdale Engrenages coniques - Nécessite un réglage (coïncidence des sommets des cônes prim itifs). - Axes non parallèles - Denture droit, hélicoïdale ou hypoïde. - Les plus courants. - Les plus économiques. - Petite roue : pignon - Pas d’effort axial. - Contact progressif donc m oins de bruit. - Présence d’un effort axial. Engrenages cylindriques à contact intérieur Z Nombre de dents Pignon - crémaillère Roue et vis sans fin m Module - Grand rapport de réduction - Vis : Z=nom bre de filets - Irréversibilité possible - Axes perpendiculaires. - Transformer un m ouvement de rotation en un m ouvement de translation et réciproquem ent. d d = m x Z Diamètre primitif - Les deux roues ont m êm e sens de rotation. haha = m Saillie hf hf = 1,25 m Creux h h = 2.25 m Hauteur de dent p = π . d / Z = π . m p Pas au primitif dada = d + 2m Diamètre de tête df df = d – 2,5 m Diamètre de pied a (d1 + d2) / 2 = m (Z1 + Z2) / 2 Entraxe de deux roues dentées Page 9 / 11
Formulaire de Mécanique (Sciences Techniques) Flexion Plane S imple C’est la répartition des actions perpendiculaires à la ligne moyenne sur toute la longueur de la poutre - Diagramme des efforts tranchants (TY) TY Maxi MfZ Maxi - Diagramme des Moments Fléchissant (MfZ) C’est la répartition des moments autour de l’axe (OZ) Sur toute la longueur de la poutre σMaxi: Contrainte normale Maximale (N/mm2) MfZ Maxi : Moments Fléchissant Maximale (Nm) IGZ : Moment Quadratique (mm4) v : Désigne la valeur de Y la plus éloignée « Y Maxi » (mm) IGZ /v : Module de flexion (mm3) ||τ||: Contrainte Tangentielle (N/mm2) || Ty Maxi||: Effort Tranchant Maximale (N) ; S : Section de la poutre (mm). ⇒ v Mfz σ = Maxi Maxi IGZ - Contrainte normale Maximale (σMaxi) v r T r - Contrainte Tangentielle (τ) Y Maxi τ = moy S MfzMaxi≤ Re σ ≤ R - Condition de Résistance IGZ Maxi pe s - Valeur du moment Quadratique de surfaces élémentaires : IGZ IGZ = bh3 / 12 Avec v = h / 2 IGZ = a4 / 12 Avec v = a / 2 IGZ = π . d4 / 64 Avec v = d / 2 IGZ = π . (D4 - d4) / 64 Avec v = D / 2 Page 10 / 11
Formulaire de Mécanique (Sciences Techniques) T orsion S imple L : Longueur de l’éprouvette en mm α θ = θ: est exprimé en rd/mm - Angle unitaire de torsion (θ) L α: angle de torsion en rd τ = ρ . θ . G : Module d’élasticité transversale ou module de Coulomb (N/mm2) R : Rayon de la section (mm) R=ρ ρmaxi τ : Contrainte de torsion (N/mm2) G - Répartition des contraintes et τ Maxi= θ . G .R Mt Io : Moment quadratique polaire en (mm4 ) θ : Angle unitaire de torsion en (rd/mm) Mt : Moment de torsion en (N.mm) G : Module d’élasticité transversale en (N/mm2) θ = - Equation de la déformation élastique G Io . θ≤θlimite - Condition de rigidité Io : Moment quadratique polaire (mm4) R : Distance entre la fibre neutre et la fibre la plus éloignée (mm) s : Coefficient de sécurité τp : (Rpg) Résistance pratique au glissement (MPa). Mt : Moment de torsion (N.mm) τMaxi : Contrainte tangentielle Maxi (N/mm2) τe : (Reg) Limite élastique au cisaillement ou au glissement (MPa) (N/mm2). - Condition de résistance τ Mt ⎛ τ = ≤ τ = e Maxi p s ⎞ Io ⎜ ⎝ ⎟ ⎠ R - Valeur du moment Quadratique plaire : Io Io = π . (D4 - d4) / 32 Io = π . d4 / 32 Page 11 / 11