Automated Piano Tuning System: A Revolutionary Approach to Self-Tuning Pianos
This project outlines the design and fabrication of an innovative automated piano tuning system that eliminates the need for human intervention. The system engages the tuning pegs through a series of motors and solenoids, ensuring precise pitch correction. Each string's frequency is analyzed using Digital Signal Processing, enabling quick adjustments. By automating piano tuning, this device aims to enhance musical performance while significantly reducing costs and time associated with traditional tuning methods.


Automated Piano Tuning System: A Revolutionary Approach to Self-Tuning Pianos
E N D
Presentation Transcript
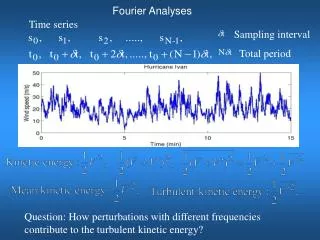
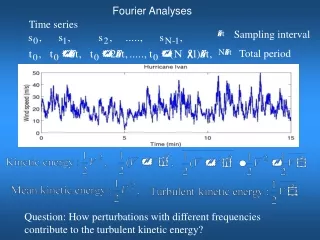
Step 5: The mutes are released and the system moves on to the next peg Step 1: Motors move the tuning mechanism along rails to the desired tuning peg, engaging it by means of a socket head attached to a motor shaft Step 4: The motor attached to the socket head turns the peg in the direction required to correct the pitch Step 2: A solenoid lifts the mute lever, raising felt mutes off of the strings and allowing them to resonate Step 3: A small solenoid strikes the associated string; its pitch is determined via Digital Signal Processing Technical Analyses Force Required to Lift Mutes Frequency of Strings r = Ratio p = Octave cents = 1200 equal intervals Pn = Frequency of note n = piano key number (from 1 – 88) Pa = Reference Frequency (A) Force on pedal = 13 lbf (-13 lbf)(8”) – B(2.5”) =0 ⇾ B = -41.6 lbf (-41.6 lbf)(10.5”) + (F)(16.5”)= 0 ⇾ F = 26.47 lbf Lead Screw Torque Gearing Torque • For Key A4: • f = frequency =440 Hz • L = length = 15 in • D= diameter of string =0.039 • r = density =0.282 lb/in^3 To find the frequency of the 40th note (indicated by a blue key) using the 49th note (shown as a yellow key) as a reference Calculating String Tensions • Frequency of each string needs to be analyzed • Electret microphone will transform in into ac signal • FFT performed to analyze occurrences of each frequency • Goal is to get voltage to rise linearly with frequency
Objective Fabrication Finalized Design • The goal of this project is to create a device capable of tuning a piano without human aid • Mechanical Objectives: • Remove mutes • Move between pegs and strings • Discreetly integrate into piano • Electrical Objectives: • Design power circuits • Implement pitch-determination system • Develop control algorithm Final Drawing of System • Drawings made for all machined parts (M-XX ): • X-, Y-, and Z-axis rails • X-, Y-, and Z-axis rail supports • Rail slides • Support plates • Motor mount plates Why Self Tune? • “Ideally, acoustics should be tuned on a weekly basis, and right before all performances as well. However, tuning is expensive and time consuming (…) Generally, the pianos (in the music room at Stevens) get one tuning per semester. This is just not enough, and yet, it's what the program can afford.” -Bethany Reeves, Director, Stevens Choir • A single professional tuning takes 60-90 minutes and costs over $100. The average piano needs to be tuned twice per year, but pianos in recording studios may need to be tuned a few times each week. • Purchased Parts (P-XX on drawing): • Lead screws • McMaster-Carr • Theta motor • Oriental motors - P/N 3TK6GN-AW2U • X,Y, and Z motors • Oriental Motors – P/N SMK237A-A Parts of a Piano Testing • Verified correct function of individual components • Ensured smooth movement over entire range-of-motion • Tested frequency determination subsystem Legend: 1. Track for Tuning / Striking Mechanisms2. Frequency Detection Subsystem 3. Mute Lifting Subsystem 4. Microcontroller Conclusions • Stronger material required for rails • Smaller motors required • Position of the tuning socket must be adjustable in order to to reach all the pegs Future Plans • File patent application • Design market-ready version • Enable the system to reach all of the pegs • Utilize more suitable materials and motors • Increase speed • Decrease noise • Decrease size • Design housing for the system • Make the system removable Flow Charts Overall System Peg Engagement System The EasyKeys Team Mechanical Engineers: - Tom Oliphant - Victoria Theese Electrical Engineers: - Patrick Rienzo - Russell Jones - Kieran Walters Faculty Advisor: - Professor Charles Geraldi Peg Location System String Location System