Radial Basis Function Network and Support Vector Machine
Radial Basis Function Network and Support Vector Machine. Team 1: J-X Huang, J-H Kim, K-S Cho 2003. 10. 29. Outline. Radial Basis Function Network Introduction Architecture Learning Strategies MLP vs RBFN Support Vector Machine Introduction VC Dimension, Structural Risk Minimization

Radial Basis Function Network and Support Vector Machine
E N D
Presentation Transcript
Radial Basis Function Networkand Support Vector Machine Team 1: J-X Huang, J-H Kim, K-S Cho 2003. 10. 29
Outline • Radial Basis Function Network • Introduction • Architecture • Learning Strategies • MLP vs RBFN • Support Vector Machine • Introduction • VC Dimension, Structural Risk Minimization • Linear Support Vector Machine • Nonlinear Support Vector Machine • Conclusion
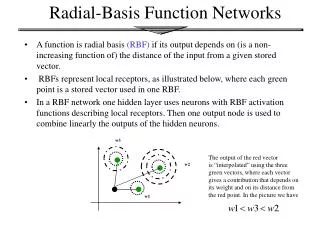
Radial Functions • Characteristic Feature • Response decreases (or increase) monotonically with distance from a central point.
Radial Basis Function Network • A kind of supervised neural networks, a feedforward network with three layers • Approximate function with linear combination of Radial basis functions F(x) = S wi G(||x-xi||) i = 1, 2, … , M • G(||x-xi||) is Radial Basis Function • Mostly Gaussian function • When M=number of sample, regularization network • When M<number of sample, we call it Radial-basis function network
1 wo x1 x2 w1 ... ... wj ... Xp-1 wm Xp Output layer Hidden layer of Radial basis Functions Input layer Architecture
Three Layers • Input layer • Source nodes that connect to the network to its environment • Hidden layer • Each hidden unit (neuron) represents a single radial basis function • Has own center position and width (spread) • Output layer • Linear combination of hidden functions
Radial Basis Function m f(x) = wjhj(x) j=1 hj(x)= exp( -(x-cj)2 / rj2 ) Where cj is center of a region, rj is width of the receptive field
Simple Summary on RBFN • A Feedforward Network • A linear model with a radial basis function • Three layers: • Input layer, hidden layer, output layer • Each hidden unit • Represents a single radial basis function • Has own center position and width (spread) • Parameter • Center, breath, weight
Design • Require • Number of radial basis neurons • Selection of the center of each neuron • Selection of the each breath (width) parameter
Number of Radial Basis Neurons • Decide by designer • Max of neurons = number of input • Min of neurons will be experimentally determined • More neurons • More complex, but smaller tolerance • Spread: the selectivity of the neuron
Learning Strategies • Two Levels of Learning • Center and spread learning (or determination) • Output layer weights learning • Fixed Center Selection • Self-organizing Center Selection • Supervised Selection of Centers with Weights • Make # (parameter) small as possible • Principles of dimensionality
Fixed Center Selection • Fixed RBFs of the hidden units • The locations of the centers may be chosen randomly from the training data set. • We can use different values of centers and widths for each radial basis function -> experimentation with training data is needed. • Only ouput layer weight is need to be learned • Obtain the value of the output layer weight by pseudo-inverse method • Main problem: require a large training set for a satisfactory level of performance
Self-Organized Selection of Center • Self-organized learning of centers by means of clustering • Clustering on the Hidden Layer • K-means clustering • Initialization • Sampling • Similarity matching • Updating • Continuation
Self-Organized Selection of Center (cont.) • Setting spreads • By selecting the average distance between center and the c closest points in the cluster (e.g. c=5) • Supervised learning on the output Layer • Estimate the connection weights w by the iterative gradient descent method based on least squares
Supervised Selection of Centers • All free parameters are changed by supervised learning process • The center is selected with the weight learning • Error-correction learning using least mean square (LMS) algorithm • Training for centers and spreads is very slow
Learning Formula • Linear weights (output layer) • Positions of centers (hidden layer) • Spreads of centers (hidden layer)
Approximation • RBF: Local network • Only inputs near a receptive field produce an activation • Can give “don’t know” output • MLP: Global network • All inputs cause an output
Outline • Radial Basis Function Network • Introduction • Radial Basis Function • Model • Training • Support Vector Machine • Introduction • VC Dimension, Structural Risk Minimization • Linear Support Vector Machine • Nonlinear Support Vector Machine • Conclusion
Introduction • Objective • Find an optimal hyperplane to: • Classify data points as much as possible • Separate the points of two classes as far as possible • Approach • Formulate a constrained optimization problem • Solve it using constrained quadratic programming (constrained QP) • Theorem • Structural Risk Minimization
Maximum margin hyperplan optimal hyperplan hyperplan Find the Optimal Hyperplan
Description on SVM • Given • A set of data points belong to either of two classes • SVM: Finds the Optimal Hyperplane • Minimizes the risk of misclassifying the training samples and unseen test samples • Maximizing the distance of either class from the hyperplane
Outline • Introduction • VC Dimension, Structural Risk Minimization • Linear Support Vector Machine • Nonlinear Support Vector Machine • Conclusion
Upper Bound for Expected Risk • Minimize the Expected Risk • Minimize the h: VC dimension • Minimize the empirical risk
True Risk Classification Error underfitting overfitting Confidence Interval Empirical Risk h(VC-dim.) VC Dimension and Empirical Risk • Empirical Risk is Decreasing Function of VC Dimension • Need a principled methods for the minimization
Structural Risk Minimization • Why Structural Risk Minimization (SRM) • It is not enough to minimize the empirical risk • Need to overcome the problem of choosing an appropriate VC dimension • SRM Principle • To minimize the expected risk, both sides in VC bound should be small • Minimize the empirical risk and VC confidence simultaneously • SRM picks a trade-off in between VC dimension and empirical risk
Outline • Introduction • VC Dimension, Structural Risk Minimization • Linear Support Vector Machine • Nonlinear Support Vector Machine • Performance and Application • Conclusion
Separable Case • Set S is Linearly Separable, then • The same as
Canonical Optimal Hyperplane w: normal to the hyperplan; is inverse proportion to the perpendicular distance from the hyperplane to the origin
Kernels • Idea • Use a transformation (x) from input space to higher dimensional space • Find the separating hyperplane, make the inverse transformation • Kernel: dot product in a Banach space • Mercer’s Condition
Kernels for Nonlinear SVMs: Example • Polynomial Kernels • Neural Network Like Kernel • Radial Function Kernel
Conclusion • Advantages • Efficient training algorithm (vs. multi-layer NN) • Represent complex and nonlinear functions (vs. single-layer NN) • Always find a global minimum • Disadvantages • Solution usually cubic in the number of training data • Large training set is a problem
Introduction • Radial Basis Function Network • A class of single hidden layer feedforward networks • Activation functions for hidden units are defined as radially symmetric basis functions such as the Gaussian function. • Advantages over Multi-Layer perceptron • Faster convergence • Smaller extrapolation errors • Higher reliability
Two Typical Radial Functions • Multi quaric RBF and Gaussian RBF