Download
1 / 1
10 likes | 203 Views
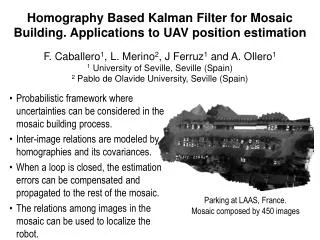
Homography Based Kalman Filter for Mosaic Building. Applications to UAV position estimation. F. Caballero 1 , L. Merino 2 , J Ferruz 1 and A. Ollero 1 1 University of Seville, Seville (Spain) 2 Pablo de Olavide University, Seville (Spain).

E N D
Homography Based Kalman Filter for Mosaic Building. Applications to UAV position estimation F. Caballero1, L. Merino2, J Ferruz1 and A. Ollero11 University of Seville, Seville (Spain) 2 Pablo de Olavide University, Seville (Spain) • Probabilistic framework where uncertainties can be considered in the mosaic building process. • Inter-image relations are modeled by homographies and its covariances. • When a loop is closed, the estimation errors can be compensated and propagated to the rest of the mosaic. • The relations among images in the mosaic can be used to localize the robot. Parking at LAAS, France. Mosaic composed by 450 images